3D Pose manifold SO(3) x R^3 and group SE(3) More...
#include <gtsam/config.h>#include <gtsam/geometry/BearingRange.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/base/Lie.h>
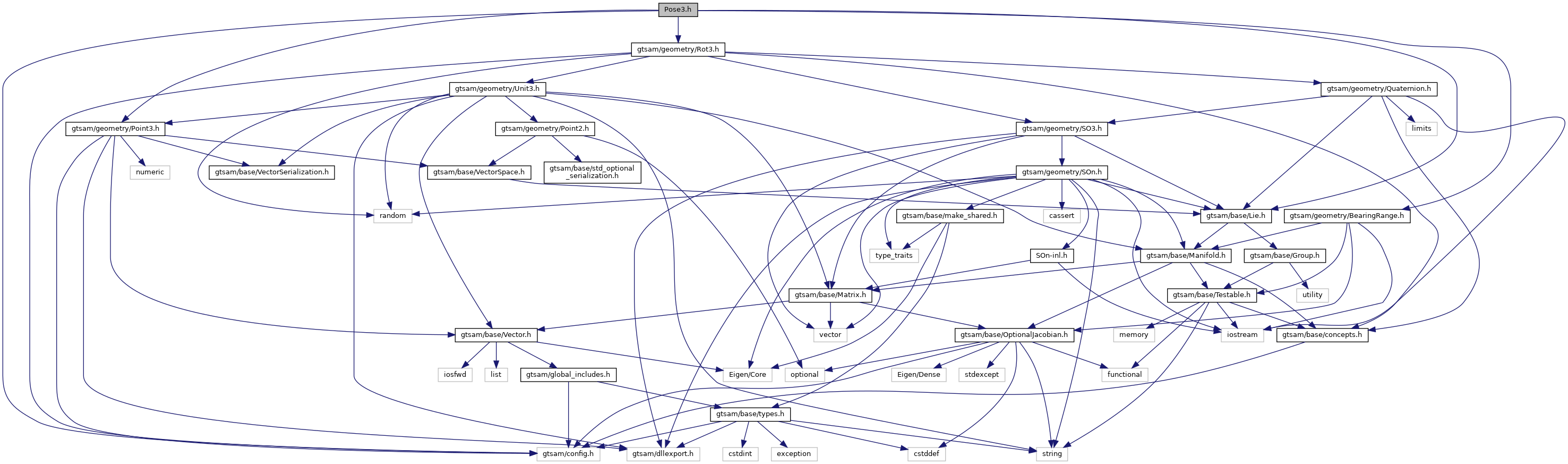
Include dependency graph for Pose3.h:
Go to the source code of this file.
Classes | |
| struct | gtsam::Bearing< Pose3, Point3 > |
| struct | gtsam::Bearing< Pose3, Pose3 > |
| struct | gtsam::Pose3::ChartAtOrigin |
| class | gtsam::Pose3 |
| struct | gtsam::Range< Pose3, T > |
| struct | gtsam::traits< const Pose3 > |
| struct | gtsam::traits< Pose3 > |
Namespaces | |
| gtsam | |
| traits | |
Typedefs | |
| using | gtsam::Pose3Pair = std::pair< Pose3, Pose3 > |
| using | gtsam::Pose3Pairs = list |
| typedef std::vector< Pose3 > | gtsam::Pose3Vector = list |
Detailed Description
3D Pose manifold SO(3) x R^3 and group SE(3)
Definition in file Pose3.h.