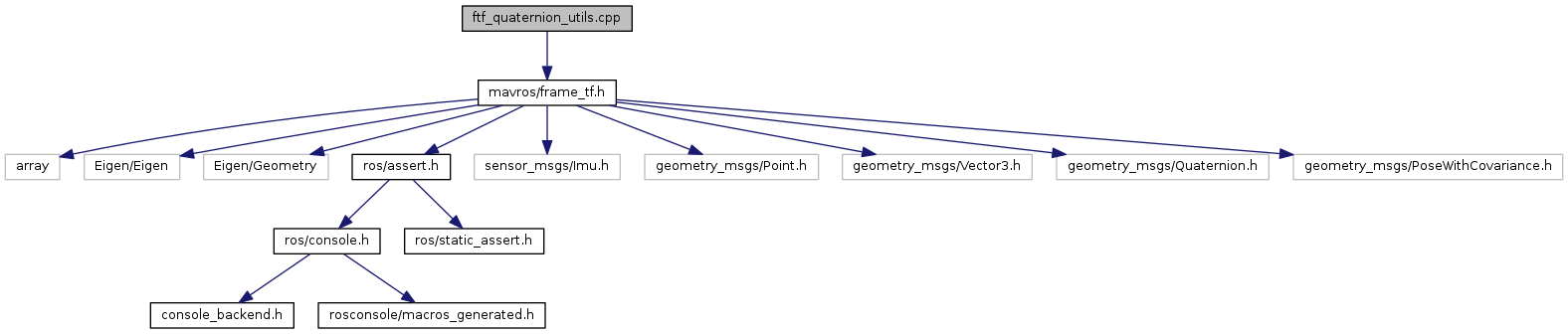
#include <mavros/frame_tf.h>
Include dependency graph for ftf_quaternion_utils.cpp:
Go to the source code of this file.
Namespaces | |
| mavros | |
| mavros::ftf | |
Functions | |
| Eigen::Quaterniond | mavros::ftf::quaternion_from_rpy (const Eigen::Vector3d &rpy) |
| Convert euler angles to quaternion. More... | |
| double | mavros::ftf::quaternion_get_yaw (const Eigen::Quaterniond &q) |
| Get Yaw angle from quaternion. More... | |
| Eigen::Vector3d | mavros::ftf::quaternion_to_rpy (const Eigen::Quaterniond &q) |
| Convert quaternion to euler angles. More... | |