#include <eigen_conversions/eigen_kdl.h>#include <eigen_conversions/eigen_msg.h>#include <geometry_msgs/WrenchStamped.h>#include <kdl_conversions/kdl_msg.h>#include <ros/ros.h>#include <tf/transform_broadcaster.h>#include <tf/transform_listener.h>#include <Eigen/Dense>#include <generic_control_toolbox/manager_base.hpp>#include <generic_control_toolbox/matrix_parser.hpp>
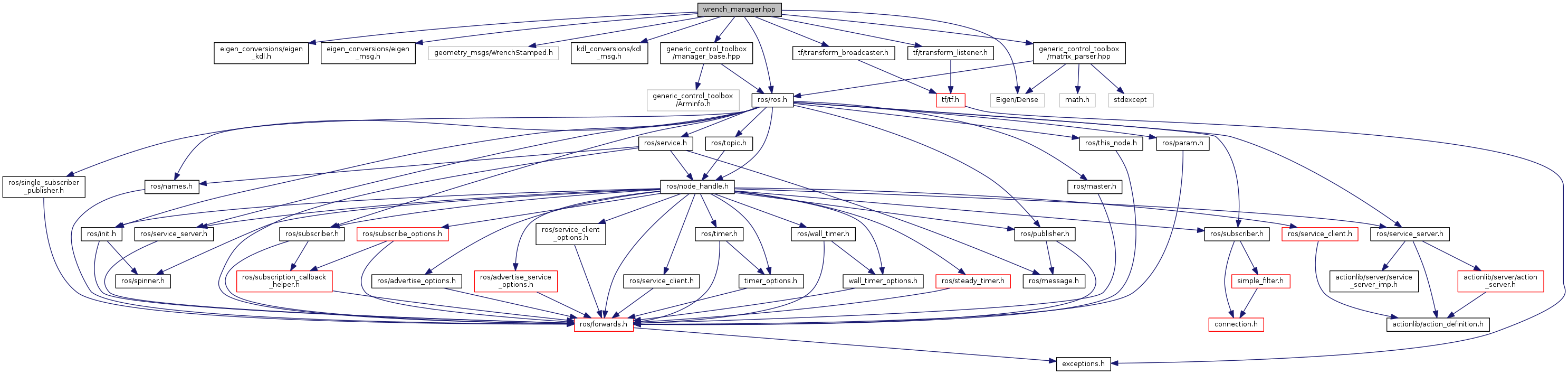
Include dependency graph for wrench_manager.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | generic_control_toolbox::WrenchManager |
Namespaces | |
| generic_control_toolbox | |
Functions | |
| bool | generic_control_toolbox::setWrenchManager (const ArmInfo &arm_info, WrenchManager &manager) |
| bool | generic_control_toolbox::setWrenchManager (const ArmInfo &arm_info, std::shared_ptr< WrenchManager > &manager) |