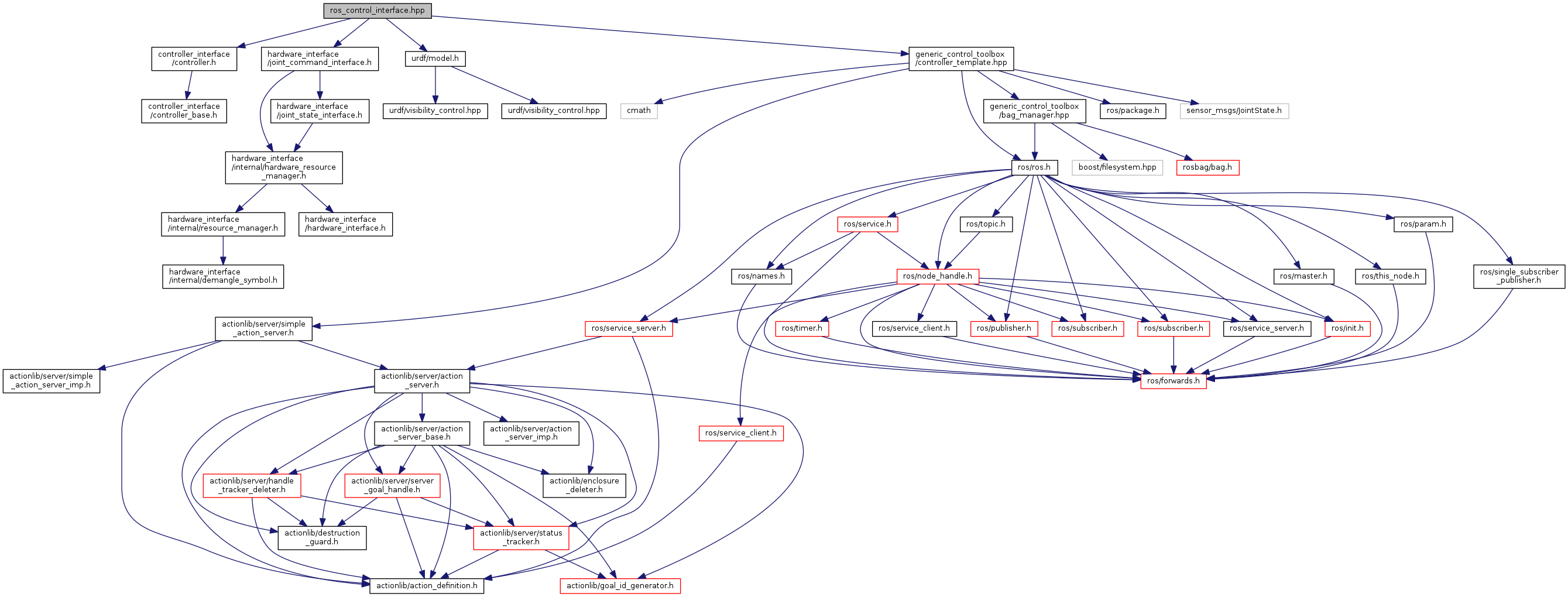
#include <controller_interface/controller.h>#include <hardware_interface/joint_command_interface.h>#include <urdf/model.h>#include <generic_control_toolbox/controller_template.hpp>
Include dependency graph for ros_control_interface.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | generic_control_toolbox::RosControlInterface< JointInterface > |
Namespaces | |
| generic_control_toolbox | |
Enumerations | |
| enum | generic_control_toolbox::JointType { generic_control_toolbox::EFFORT, generic_control_toolbox::VELOCITY, generic_control_toolbox::POSITION } |