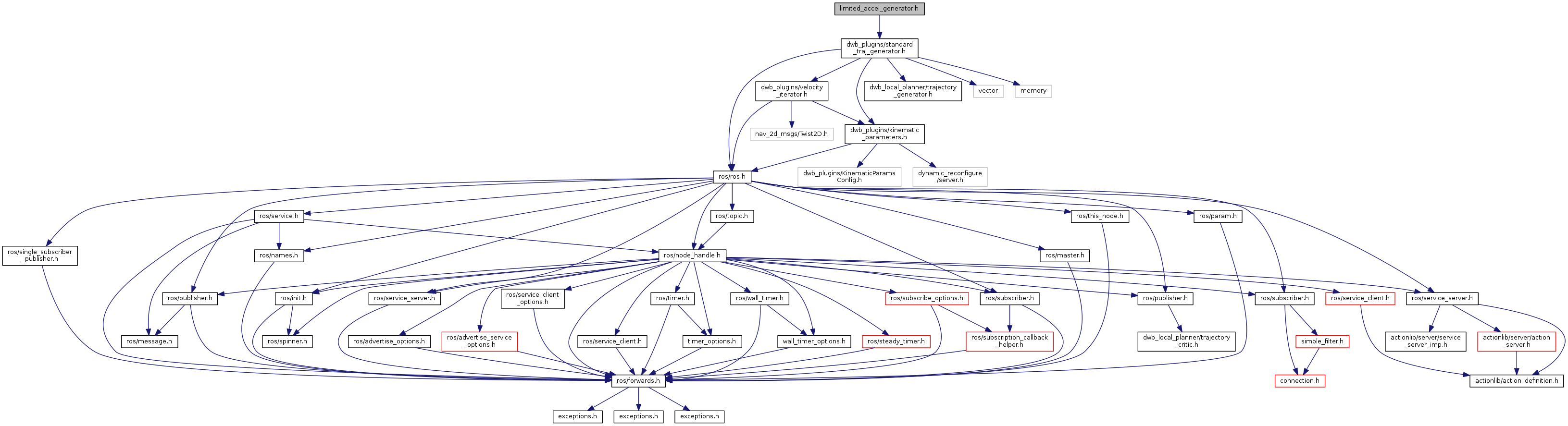
#include <dwb_plugins/standard_traj_generator.h>
Include dependency graph for limited_accel_generator.h:
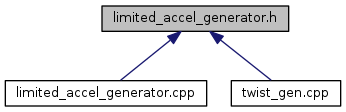
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dwb_plugins::LimitedAccelGenerator |
| Limits the acceleration in the generated trajectories to a fraction of the simulated time. More... | |
Namespaces | |
| dwb_plugins | |