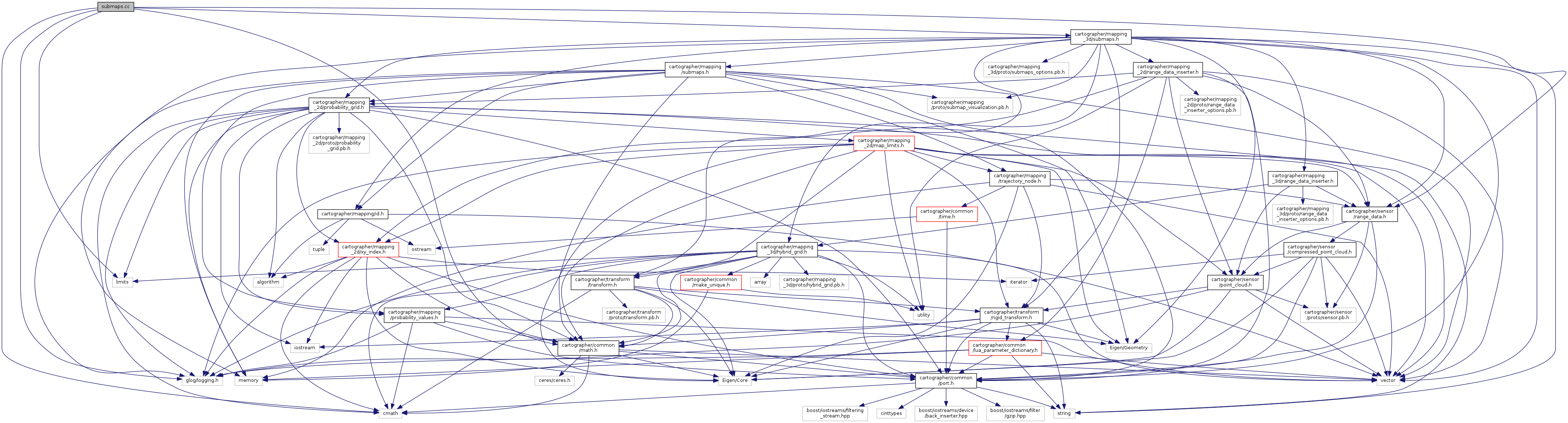
#include "cartographer/mapping_3d/submaps.h"#include <cmath>#include <limits>#include "cartographer/common/math.h"#include "cartographer/sensor/range_data.h"#include "glog/logging.h"
Include dependency graph for 3d/submaps.cc:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping_3d | |
Functions | |
| proto::SubmapsOptions | cartographer::mapping_3d::CreateSubmapsOptions (common::LuaParameterDictionary *parameter_dictionary) |
| void | cartographer::mapping_3d::InsertIntoProbabilityGrid (const sensor::RangeData &range_data, const transform::Rigid3f &pose, const float slice_z, const mapping_2d::RangeDataInserter &range_data_inserter, mapping_2d::ProbabilityGrid *result) |
Variable Documentation
| int count = 0 |
Definition at line 42 of file 3d/submaps.cc.
| Eigen::Vector2f from |
Definition at line 34 of file 3d/submaps.cc.
| bool hit |
Definition at line 36 of file 3d/submaps.cc.
| float max_probability = 0.5f |
Definition at line 44 of file 3d/submaps.cc.
| int max_z = INT_MIN |
Definition at line 41 of file 3d/submaps.cc.
| int min_z = INT_MAX |
Definition at line 40 of file 3d/submaps.cc.
| float probability_sum = 0.f |
Definition at line 43 of file 3d/submaps.cc.
| Eigen::Vector2f to |
Definition at line 35 of file 3d/submaps.cc.