Welcome to pilz_robot_programming’s documentation!¶
The pilz_robot_programming package provides the user with an easy to use API to move a MoveIt! enabled robot.
It’s target is to execute standard industrial robot commands like Ptp, Lin and
Circ using the pilz_industrial_motion_planner::CommandPlanner plugin for MoveIt!. It also provides
the user with the possibility to execute command sequences (called Sequence). On top of that,
the robot movement can be paused, resumed and stopped.
All examples are given for a PRBT robot but the API is general enough to be used with any robot that
has a MoveIt! configuration, it merely requires the availability of the service /get_speed_override
for obtaining the speed override of the robot system.
The robot API has some similarity to the moveit_commander package but differs in its specialization for
classical industrial robot commands to be executed by the pilz_industrial_motion_planner MoveIt! plugin. The
robot API connects to MoveIt! using the standard move_group action interface and the custom sequence_move_group
action, that the sequence capability implements.
See the package pilz_industrial_motion_planner for more details about the parameters for industrial trajectory
generation.
A simple demo program¶
To run the demo program it is first necessary to startup the simulated or the real robot. Afterwards, you can execute the demo program by typing:
$ rosrun pilz_robot_programming demo_program.py
The code demo_program.py¶
#!/usr/bin/env python
# Copyright (c) 2018 Pilz GmbH & Co. KG
#
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Lesser General Public License as published by
# the Free Software Foundation, either version 3 of the License, or
# (at your option) any later version.
#
# This program is distributed in the hope that it will be useful,
# but WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
# GNU Lesser General Public License for more details.
#
# You should have received a copy of the GNU Lesser General Public License
# along with this program. If not, see <http://www.gnu.org/licenses/>.
from geometry_msgs.msg import Point
from pilz_robot_programming import *
import math
import rospy
__REQUIRED_API_VERSION__ = "1"
def start_program():
print("Executing " + __file__)
r = Robot(__REQUIRED_API_VERSION__)
# Simple ptp movement
r.move(Ptp(goal=[0, 0.5, 0.5, 0, 0, 0], vel_scale=0.4))
start_joint_values = r.get_current_joint_states()
# Relative ptp movement
r.move(Ptp(goal=[0.1, 0, 0, 0, 0, 0], relative=True, vel_scale=0.2))
r.move(Ptp(goal=Pose(position=Point(0, 0, -0.1)), relative=True))
r.move(Ptp(goal=[-0.2, 0, 0, 0, 0, 0], relative=True, acc_scale=0.2))
pose_after_relative = r.get_current_pose()
# Simple Lin movement
r.move(Lin(goal=Pose(position=Point(0.2, 0, 0.8)), vel_scale=0.1, acc_scale=0.1))
# Relative Lin movement
r.move(Lin(goal=Pose(position=Point(0, -0.2, 0), orientation=from_euler(0, 0, math.radians(15))), relative=True,
vel_scale=0.1, acc_scale=0.1))
r.move(Lin(goal=Pose(position=Point(0, 0.2, 0)), relative=True,
vel_scale=0.1, acc_scale=0.1))
# Circ movement
r.move(Circ(goal=Pose(position=Point(0.2, -0.2, 0.8)), center=Point(0.1, -0.1, 0.8), acc_scale=0.1))
# Move robot with stored pose
r.move(Ptp(goal=pose_after_relative, vel_scale=0.2))
# Repeat the previous steps with a sequence command
sequence = Sequence()
sequence.append(Lin(goal=Pose(position=Point(0.2, 0, 0.8)), vel_scale=0.1, acc_scale=0.1))
sequence.append(Circ(goal=Pose(position=Point(0.2, -0.2, 0.8)), center=Point(0.1, -0.1, 0.8), acc_scale=0.1))
sequence.append(Ptp(goal=pose_after_relative, vel_scale=0.2))
r.move(sequence)
# Move to start goal for sequence demonstration
r.move(Ptp(goal=start_joint_values))
# Blend sequence
blend_sequence = Sequence()
blend_sequence.append(Lin(goal=Pose(position=Point(0.2, 0, 0.7)), acc_scale=0.05), blend_radius=0.01)
blend_sequence.append(Lin(goal=Pose(position=Point(0.2, 0.1, 0.7)), acc_scale=0.05))
r.move(blend_sequence)
# Move with custom reference frame
r.move(Ptp(goal=PoseStamped(header=Header(frame_id="prbt_tcp"),
pose=Pose(position=Point(0, 0, 0.1)))))
r.move(Ptp(goal=Pose(position=Point(0, -0.1, 0)), reference_frame="prbt_link_3", relative=True))
# Create and execute an invalid ptp command with out of bound joint values
try:
r.move(Ptp(goal=[0, 10.0, 0, 0, 0, 0]))
except RobotMoveFailed:
rospy.loginfo("Ptp command did fail as expected.")
if __name__ == "__main__":
# Init a ros node
rospy.init_node('robot_program_node')
start_program()
The code explained¶
In this section parts of the demo program are explained to give a better understanding how the robot API is used.
| note: | The chosen code snippets are not necessarily in order. |
|---|
Robot creation¶
from pilz_robot_programming import *
At first we import the robot API.
rospy.init_node('robot_program_node')
This code snippet initializes ROS.
r = Robot(__REQUIRED_API_VERSION__)
Here the robot object is created, which, subsequently, is used to move the robot.
The API version argument ensures, that the correct API version is used. This makes sure, that the robot behaves as expected/intended. In case the versions do not match, an exception is thrown.
| note: | For the API version check only the major version number is relevant. |
|---|---|
| note: | In general the speed of all motions depends on the operation mode of the robot system. For more information see prbt_hardware_support. |
Move¶
r.move(Ptp(goal=[0, 0.5, 0.5, 0, 0, 0]))
r.move(Lin(goal=Pose(position=Point(0.2, 0, 0.8))))
r.move(Circ(goal=Pose(position=Point(0.2, 0.2, 0.8)), center=Point(0.3, 0.1, 0.8)))
The move() function is the most important part of the robot API. With the help of the move()
function the user can execute the different robot motion commands, like shown for Ptp, Lin
and Circ.
By default cartesian goals are interpreted as poses of the tool center point (TCP) link.
The transformation between the TCP link and the last robot link can be adjusted through the tcp_offset_xyz and
tcp_offset_rpy parameters in prbt.xacro.
Move failure¶
try:
r.move(Ptp(goal=[0, 10.0, 0, 0, 0, 0]))
except RobotMoveFailed:
rospy.loginfo("Ptp command did fail as expected.")
In case a robot motion command fails during the execution, the move() function throws
an RobotMoveFailed exception which can be caught using standard python mechanisms.
The goal: Joint vs. Cartesian space¶
r.move(Ptp(goal=[0, 0.5, 0.5, 0, 0, 0]))
r.move(Lin(goal=Pose(position=Point(-0.2, -0.2, 0.6), orientation=from_euler(0.1, 0, 0))))
The goal pose for Ptp and Lin commands can be stated either in joint space or
in Cartesian space.
r.move(Circ(goal=Pose(position=Point(0.2, 0.2, 0.8)), center=Point(0.3, 0.1, 0.8)))
The goal and the auxiliary pose of Circ commands have to be stated in Cartesian space.
Relative commands¶
r.move(Ptp(goal=[0.1, 0, 0, 0, 0, 0], relative=True))
r.move(Lin(goal=Pose(position=Point(0, -0.2, -0.2)), relative=True))
Ptp and Lin commands can also be stated as relative commands indicated by the argument
relative=True. Relative commands state the goal as offset relative to the current robot position.
As long as no custom reference frame is set, the offset has to be stated with regard to the base coordinate system.
The orientation is added as offset to the euler-angles.
Custom Reference Frame¶
r.move(Ptp(goal=PoseStamped(header=Header(frame_id="prbt_tcp"),
pose=Pose(position=Point(0, 0, 0.1)))))
r.move(Ptp(goal=Pose(position=Point(0, -0.1, 0)), reference_frame="prbt_link_3", relative=True))
For all three move classes Ptp, Lin and Circ you can define a custom reference
frame.
Passing a PoseStamped with the Header set to any valid tf2 frame_id is supported besides an extra argument
reference_frame. The goal passed is interpreted relative to the given coordinate frame instead of the default
system prbt_base.
The custom reference frame argument (reference_frame="target_frame") has to be a valid tf frame id and can be paired with the relative command.
When paired with relative flag, the goal will be applied to the current robot pose in this custom reference frame.
| note: | Further information on tf is available on http://wiki.ros.org/tf (e.g. on how to create custom frames: section 6.3). |
|---|
More Detailed Explanation¶
Let’s assume we have three coordinate systems in our application. (displayed with a green and blue line)

prbt_baseis the default coordinate system. It was used in the previous sections.- The
prbt_tcpframe is the current position of the gripper. - The third frame
palletis supposed to be an edge of an product tray, that we placed somewhere in the robot environment.
We then have three possible frames, we can choose to execute our goal in.

In the image above we displayed three move commands. All three commands move the robot to position x = y = 0 and z = 0.2, but use the different frames as reference.
- goal=Pose(position=Point(0, 0, 0.2))) or goal=Pose(position=Point(0, 0, 0.2)), reference_frame=”prbt_base”)
- goal=Pose(position=Point(0, 0, 0.2)), reference_frame=”prbt_tcp”)
- goal=Pose(position=Point(0, 0, 0.2)), reference_frame=”pallet”)
When adding the relative flag additionally, the goal will be added to the current tcp pose using the chosen frame. This results in the tcp moving in different directions depending on which frame we used.

In this case we just added the relative flag to the previous goals.
- goal=position=Point(0, 0, 0.2)), relative=True)
- goal=position=Point(0, 0, 0.2)), reference_frame=”prbt_tcp”, relative=True)
- goal=position=Point(0, 0, 0.2)), reference_frame=”pallet”, relative=True)
As can be seen above, the relative movement used the z axis of the choosen reference frame, which resulted in different movements of the tcp, except for the tcp frame itself. In the case of the tcp frame, relative and absolut movement is the same.
Example of Usage¶
To display how and when to use this options we take a look on a small example.
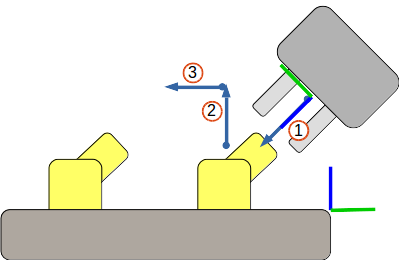
This image is supposed to display a series of pick operations on a rigid object. The products are placed on a product tray, thus having a fixed position relative to the pallet reference frame.
To get the robot in a position similar to the robot in this image we could use a move command with a custom reference_frame.
r.move(Ptp(goal=[0.1, -0.05, 0.2, 2.3561, 0, 0], reference_frame="pallet"))
This would result in a scene, that looks somewhat like the image above. (The Rotation around the x axis is necessary to reach the current tcp rotation)
The next commands in the sequence will be:
- close in to grab the object
- move straight up to lift it
- move to the next object
For the first task we can easily use the tcp ref, since its rotation already fits our goal.
r.move(Ptp(goal=position=Point(0, 0, 0.1)), reference_frame="prbt_tcp"))
The second command - lifting the object - is best achieved by using an relative movement to the pallet frame. (We could as well use the global system in this case, but when the tray is tilted, like in the images above it could be problematic to do so.)
r.move(Ptp(goal=position=Point(0, 0, 0.1)), relative= True, reference_frame="pallet"))
For the third move we again should use the relative move in the “pallet” reference frame.
r.move(Ptp(goal=position=Point(0, -0.1, 0)), relative= True, reference_frame="pallet"))
In case we want to place the product somewhere else, previous to moving to the next object, we would instead use the absolute command in the pallet reference frame or add new frames for each object on the tray and do all operations for each object relative its frame.
Sequence¶
# Repeat the previous steps with a sequence command
sequence = Sequence()
sequence.append(Lin(goal=Pose(position=Point(0.2, 0, 0.8)), vel_scale=0.1, acc_scale=0.1))
sequence.append(Circ(goal=Pose(position=Point(0.2, -0.2, 0.8)), center=Point(0.1, -0.1, 0.8), acc_scale=0.4))
sequence.append(Ptp(goal=pose_after_relative, vel_scale=0.2))
r.move(sequence)
To concatenate multiple trajectories and plan the trajectory at once, you can
use the Sequence command.
| note: | In case the planning of a command in a Sequence fails, non of the commands
in the Sequence are executed. |
|---|
As an optional argument, a blending radius can be given to the Sequence command. The blending radius
states how much the robot trajectory can deviate from the original trajectory (trajectory without blending) to
blend the robot motion from one trajectory to the next. Setting the blending radius to zero corresponds to a Sequence
without blending like above. If a blending radius greaten than zero is given,
the robot will move from one trajectory to the next without stopping.
# Blend sequence
blend_sequence = Sequence()
blend_sequence.append(Lin(goal=Pose(position=Point(0.2, 0, 0.6))), blend_radius=0.01)
blend_sequence.append(Lin(goal=Pose(position=Point(0.2, 0, 0.7))))
r.move(blend_sequence)
| note: | The last command of the sequence has to have zero blending radius which can be achieved by omitting the blend radius argument. |
|---|---|
| note: | The robot always stops between gripper and non-gripper commands. |
| note: | Gripper commands cannot be blended together. |
Gripper¶
If the launch file is started with the real robot and the argument gripper:=pg70, the gripper can
be opened or closed via:
r.move(Gripper(gripper_pos=0.02))
Set the gripper_pos argument to a distance in meters. Both gripper fingers of the
PG+70 gripper move by the same distance so the gripper is twice as open as specified.
Current TCP pose and current joint values¶
start_joint_values = r.get_current_joint_states()
pose_after_relative = r.get_current_pose()
The API provides functions which allow the user to determine the current joint values of the robot and the current TCP pose. The return value of both functions can directly be used to create new motion commands:
r.move(Ptp(goal=pose_after_relative, vel_scale=0.2))
r.move(Ptp(goal=start_joint_values))
The function get_current_pose can also return the current pose in respect to another frame.
To do this, set the base argument, to the corresponding reference frame.
tcp_pose_in_tf = r.get_current_pose(base="target_frame")
Brake Test¶
The method is_brake_test_required() will check whether the robot needs to perform a brake test.
So place it in your program somewhere such that it is checked repeatedly.
The method execute_brake_test() executes the brake test and throws an exception, should it fail.
if r.is_brake_test_required():
try:
r.execute_brake_test()
except RobotBrakeTestException as e:
rospy.logerr(e)
except rospy.ROSException as e:
rospy.logerr("failed to call the service")
Move control orders¶
The user can make service calls in order to control the movement of the robot. A running program can be paused by typing
rosservice call pause_movement
If the robot is currently moving, it is stopped. A paused execution can be resumed via
rosservice call resume_movement
This also resumes the last robot movement from where it stopped. A resume order without preceding pause has no effects. There also exists the possibility to abort the program using
rosservice call stop_movement
API reference¶
API for easy usage of Pilz robot commands.
-
class
pilz_robot_programming.robot.Robot(version=None, *args, **kwargs)¶ Bases:
objectMain component of the API which allows the user to execute robot motion commands and pause, resume or stop the execution. The following commands are currently supported:
For a more detailed description of the individual commands please see the documentation of the corresponding command. Especially see the documentation of the pilz_industrial_motion_planner package to get more information on additional parameters that can be configured in the MoveIt! plugin.
The commands are executed with the help of Moveit.
Note: To any given time only one instance of the Robot class is allowed to exist.
Note: Before you create an instance of
Robot, ensure that MoveIt is up and running, because the constructor blocks until all necessary connections to Moveit are established. Currently connections to the following topics have to be established before the function finishes:- move_group
- sequence_move_group
Note: Currently the API does not support creating a new instance of
Robotafter deleting an old one in the same program. However this can be realized by calling_release()before the deletion.Parameters: version – To ensure that always the correct API version is used, it is necessary to state which version of the API is expected. If the given version does not match the version of the underlying API then an exception is thrown. Only the major version number is considered.
Raises: - RobotVersionError – if the given version string does not match the module version.
- RobotMultiInstancesError – if an instance of Robot class already exists.
-
__init__(version=None, *args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
get_planning_frame()¶ Get the name of the frame in which the robot is planning.
-
get_active_joints(planning_group)¶ Returns the joints contained in the specified planning group
-
get_current_joint_states(planning_group='manipulator')¶ Returns the current joint state values of the robot. :param planning_group: Name of the planning group, default value is “manipulator”. :return: Returns the current joint values as array :rtype: array of floats :raises RobotCurrentStateError if given planning group does not exist.
-
get_current_pose_stamped(target_link='prbt_tcp', base='prbt_base')¶ Returns the current stamped pose of target link in the reference frame. :param target_link: Name of the target_link, default value is “prbt_tcp”. :param base: The target reference system of the pose, default ist “prbt_base”. :return: Returns the stamped pose of the given frame :rtype: geometry_msgs.msg.PoseStamped :raises RobotCurrentStateError if the pose of the given frame is not known
-
get_current_pose(target_link='prbt_tcp', base='prbt_base')¶ Returns the current pose of target link in the reference frame. :param target_link: Name of the target_link, default value is “prbt_tcp”. :param base: The target reference system of the pose, default ist “prbt_base”. :return: Returns the pose of the given frame :rtype: geometry_msgs.msg.Pose :raises RobotCurrentStateError if the pose of the given frame is not known
-
move(cmd)¶ Allows the user to start/execute robot motion commands.
The function blocks until the specified command is completely executed.
The commands are executed with the help of Moveit.
Note: While
move()is running no further calls tomove()are allowed.Parameters: cmd –
The robot motion command which has to be executed. The following commands are currently supported:
Raises: - RobotUnknownCommandType – if an unsupported command is passed to the function.
- RobotMoveAlreadyRunningError – if a move command is already running.
- RobotMoveFailed – if the execution of a move command fails.
Due to the exception any thread or script calling the
move()function ends immediately. An exception is thrown instead of returning an error to ensure that no further robot motion commands are executed.
-
stop()¶ The stop function allows the user to cancel the currently running robot motion command and . This is also true for a paused command.
Note: Function calls to move()andstop()have to be performed from different threads becausemove()blocks the calling thread. The move-thread is terminated. If no motion command is active, the stop-thread is terminated.
-
pause()¶ The pause function allows the user to stop the currently running robot motion command. The
move()function then waits for resume. The motion can still be canceled usingstop().Note: Function calls to move()andpause()have to be performed from different threads becausemove()blocks the calling thread.
-
resume()¶ The function resumes a paused robot motion. If the motion command is not paused or no motion command is active, it has no effects.
Note: Function calls to move()andresume()have to be performed from different threads becausemove()blocks the calling thread.
-
is_brake_test_required()¶ Checks whether a brake test is currently required.
Raises: ServiceException – if it cannot determined if a braketest is needed. Returns: True: if brake test is required, False: otherwise Note: Function blocks until an answer is available.
-
execute_brake_test()¶ Execute a brake test. If successful, function exits without exception.
Raises: - RobotBrakeTestException – when brake test was not successful. Will contain information about reason for failing of the brake test.
- ServiceException – when the required ROS service is not available.
Note: Function blocks until brake test is finished.
-
__weakref__¶ list of weak references to the object (if defined)
API for easy usage of Pilz robot commands.
-
class
pilz_robot_programming.commands.BaseCmd(goal=None, planning_group='manipulator', target_link='prbt_tcp', vel_scale=0.1, acc_scale=0.1, relative=False, reference_frame='prbt_base', *args, **kwargs)¶ Bases:
pilz_robot_programming.commands._AbstractCmdBase class for all single commands.
Parameters: - goal – The goal of the motion, which can be given in joint (list or tuple of float, in the order of active joints in the planning group) or Cartesian space. For geometry_msgs/Pose you can specify the reference frame as extra parameter reference_frame (see below). If a PoseStamped is passed as goal, timestamp has to be zero and the frame_id from the Header is used instead of reference_frame
- planning_group – Name of the planning group, default as “manipulator”.
- target_link – Name of the target link if Cartesian goal is given, default as “prbt_tcp”
- relative (bool) –
Has to be set to:
Falseif the goal states the target position as absolute position with regard to base coordinate- system.
Trueif the goal states the target position as offset relative to the current robot position.
The orientation is added as offset to the euler-angles. The offset has to be stated with regard to the base coordinate system. E.g. to move the robot 0.1m up and tilt it 10degrees around the global z-axis use:
Ptp(goal=Pose(position=Point(0., 0., 0.1), orientation=from_euler(math.radians(10), 0., 0.)), vel_scale=0.4)
Note the gimbal lock, if you pass a relative rotation to this function: If b==0, the values for a and c depend on each other and may thus give arbitrary euler angles, when converting back from quaternion to euler internally. The function assumes, you want to take the shorter rotation distance, so you should only pass rotations smaller than 180 degrees for relative movements.
- reference_frame (string) – The frame of reference parameter allows to change the reference coordinate system for the passed goal position and orientation. Any published tf can be used as frame by reference. The reference_frame has to be a valid tf id string. Setting no reference_frame will use “prbt_base” as default.
Note: The geometry_msgs/Pose consists of position and orientation (quaternion). When creating an instance of geometry_msgs/Pose, the position and orientation can be left as uninitialized. The uninitialized position is considered as zero position. The uninitialized orientation is considered as keeping the current orientation unchanged. This difference is because uninitialized position can not be recognized when comparing with a zero position but uninitialized orientation can.
-
__init__(goal=None, planning_group='manipulator', target_link='prbt_tcp', vel_scale=0.1, acc_scale=0.1, relative=False, reference_frame='prbt_base', *args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
__str__()¶ Return str(self).
-
__eq__(other)¶ Return self==value.
-
__ne__(other)¶ Return self!=value.
-
__hash__()¶ Return hash(self).
-
__repr__()¶ Return str(self).
-
class
pilz_robot_programming.commands.Ptp(vel_scale=1.0, acc_scale=None, *args, **kwargs)¶ Bases:
pilz_robot_programming.commands.BaseCmdRepresents a single point-to-point (Ptp) command. A
Ptpcommand allows the user to quickly move the robot from its current position to a specified point in space (goal). The trajectory taken to reach the goal is defined by the underlying planning algorithms and cannot not be defined by the user.Parameters: - vel_scale –
The velocity scaling factor allows to limit the highest possible axis velocity. The velocity scaling factor is a scalar. The value is applied to all axes. The value is given in percentage of the maximal velocity of an axis and has to be in range: (0,1]. The allowed axis velocity for each axis is calculated as follows:
allowed axis velocity = vel_scale * maximal axis velocity - acc_scale –
The acceleration scaling factor allows to limit the highest possible axis acceleration. The acceleration scaling factor is a scalar value. The value is applied to all axes. The value is given in percentage of the maximal acceleration of an axis and has to be in range: (0,1]. The allowed axis acceleration for each axis is calculated as follows:
allowed axis acceleration = vel_scale * maximal axis accelerationIf no acceleration scaling factor is given, the acceleration scaling factor is set as follows:
acc_scale = vel_scale * vel_scale
-
__init__(vel_scale=1.0, acc_scale=None, *args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
__str__()¶ Return str(self).
-
__repr__()¶ Return str(self).
- vel_scale –
-
class
pilz_robot_programming.commands.Lin(vel_scale=0.1, acc_scale=None, *args, **kwargs)¶ Bases:
pilz_robot_programming.commands.BaseCmdRepresents a linear command. A
Lincommand allows the user to move the robot from its current position to a specified point in space (goal). The trajectory taken to reach the goal is a straight line (in Cartesian space).Parameters: - vel_scale –
The velocity scaling factor allows to limit the highest possible cartesian velocity of the TCP frame. The velocity scaling factor is a scalar value. The value is given in percentage of the maximal allowed cartesian velocity and has to be in range: (0,1]. The allowed cartesian velocity of the TCP frame is calculated as follows:
allowed cartesian velocity = vel_scale * maximal cartesian velocity - acc_scale –
The acceleration scaling factor allows to limit the highest possible cartesian acceleration of the TCP frame. The acceleration scaling factor is a scalar value. The value is given in percentage of the maximal allowed cartesian acceleration and has to be in range: (0,1]. The allowed cartesian acceleration of the TCP frame is calculated as follows:
allowed cartesian acceleration = acc_scale * maximal cartesian accelerationIf no acceleration scaling factor is given, the acceleration scaling factor is set as follows:
acc_scale = vel_scale
-
__init__(vel_scale=0.1, acc_scale=None, *args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
__str__()¶ Return str(self).
-
__repr__()¶ Return str(self).
- vel_scale –
-
class
pilz_robot_programming.commands.Circ(interim=None, center=None, vel_scale=0.1, acc_scale=None, *args, **kwargs)¶ Bases:
pilz_robot_programming.commands.BaseCmdRepresents a circular command. A
Circcommand allows the user to move the robot from its current position to a specified point in space (goal). The trajectory taken to reach the goal represents a circle (in Cartesian space). The circle is defined by the current position of the robot, the specified interim/center point and the goal position.Note: The circle can be completely defined by stating a interim or an center position. However, only one of both should be stated.
Parameters: - interim – Position in cartesian space (geometry_msgs/Point), which lies on the circle on which the robot is supposed to move. The position has to lie between the current position of the robot and the goal position. The interim position indicates in which direction of the circle the robot is supposed to move.
- center – The center point (stated in Cartesian space) of the circle on which the robot is supposed to move. If the center point is given, the robot moves in the direction of the smallest angle to the goal.
- vel_scale –
The velocity scaling factor allows to limit the highest possible cartesian velocity of the TCP frame. The velocity scaling factor is a scalar value. The value is given in percentage of the maximal allowed cartesian velocity and has to be in range: (0,1]. The allowed cartesian velocity of the TCP frame is calculated as follows:
allowed cartesian velocity = vel_scale * maximal cartesian velocity - acc_scale –
The acceleration scaling factor allows to limit the highest possible cartesian acceleration of the TCP frame. The acceleration scaling factor is a scalar value. The value is given in percentage of the maximal allowed cartesian acceleration and has to be in range: (0,1]. The allowed cartesian acceleration of the TCP frame is calculated as follows:
allowed cartesian acceleration = acc_scale * maximal cartesian accelerationIf no acceleration scaling factor is given, the acceleration scaling factor is set as follows:
acc_scale = vel_scale
-
__init__(interim=None, center=None, vel_scale=0.1, acc_scale=None, *args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
__str__()¶ Return str(self).
-
__repr__()¶ Return str(self).
-
class
pilz_robot_programming.commands.Sequence(*args, **kwargs)¶ Bases:
pilz_robot_programming.commands._AbstractCmdRepresents an overall Sequence command. A
Sequenceconsists of one or more robot motion commands. All commands in a sequence are planned first. After all commands in a sequence are planned, they are executed.If the blending radius between two or more commands is greater than zero, the commands are blended together, in other words, the robot will not stop at the end of each command. To allow a smooth transition from one trajectory to the next (in case of blending), the original trajectories are altered slightly within the sphere defined by the blending radius.
Note: In case the blend radius is zero, the robot executes the robot motion commands as if they are sent separately. Note: The robot always stops between gripper and non-gripper commands. Note: Gripper commands cannot be blended together. Note: In case the planning of a command in a sequence fails, non of the commands in the sequence are executed. -
__init__(*args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
append(cmd, blend_radius=0)¶ Adds the given robot motion command to the sequence.
Parameters: - cmd (
pilz_robot_programming.commands.BaseCmd) – The robot motion command which has to be added to the sequence. The blending happens between the specified command and the command following the specified command if a non-zero blend_radius is defined. Otherwise, if the blend radius is zero, the commands will execute consecutively. The blend radius preceding a gripper command is always ignored. The blend radius stated with a gripper command is also ignored. - blend_radius (float) – The blending radius states how much the robot trajectory can deviate from the original trajectory (trajectory without blending) to blend the robot motion from one trajectory to the next. The blending happens inside a sphere with a radius specified by the blending radius. When the trajectory leaves the sphere the trajectory is back on the original trajectory.
Note: The last command of the sequence has to have zero blending radius which can be achieved by omitting the last blend radius argument.
- cmd (
-
__str__()¶ Return str(self).
-
__repr__()¶ Return str(self).
-
-
class
pilz_robot_programming.commands.Gripper(goal, vel_scale=0.1, *args, **kwargs)¶ Bases:
pilz_robot_programming.commands.BaseCmdRepresents a gripper command to open and close the gripper. A
grippercommand allows the user to move the gripper finger to desired opening width.Parameters: - goal – half of the opening width in meter (0 to 0.03m).
- vel_scale –
The velocity scaling factor allows to limit the highest possible axis velocity. The velocity scaling factor is a scalar. The value is given in percentage of the maximal velocity of an axis and has to be in range: (0,1]. The allowed axis velocity for each axis is calculated as follows:
allowed axis velocity = vel_scale * maximal axis velocity
-
__init__(goal, vel_scale=0.1, *args, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
__str__()¶ Return str(self).
-
__repr__()¶ Return str(self).
-
pilz_robot_programming.commands.from_euler(a, b, c)¶ Convert euler angles into a geometry.msg.Quaternion.
Pass euler angles a, b, c in intrinsic ZYZ convention (in radians).
Use this function to fill pose values for
Ptp/Lincommands:r.move(Ptp(goal=Pose(position=Point(0.6, -0.3, 0.2), orientation=from_euler(0, pi, 0))))
Parameters: - a – rotates around the z-axis.
- b – rotates around the new y-axis.
- c – rotates around the new z-axis.
Note: e.g. (0, pi, 0) orients the tool downwards, (pi/2., pi/2., 0) horizontal west