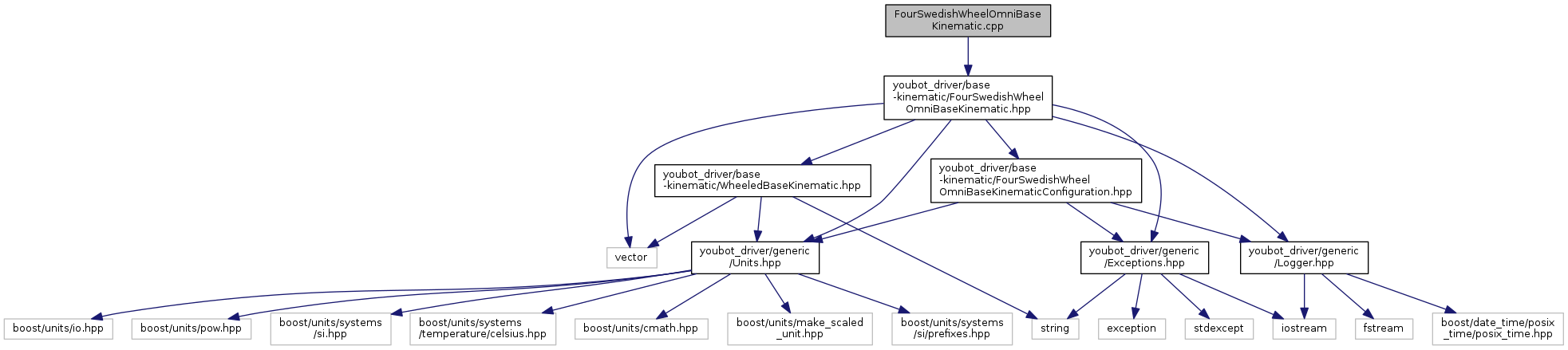
#include "youbot_driver/base-kinematic/FourSwedishWheelOmniBaseKinematic.hpp"
Go to the source code of this file.