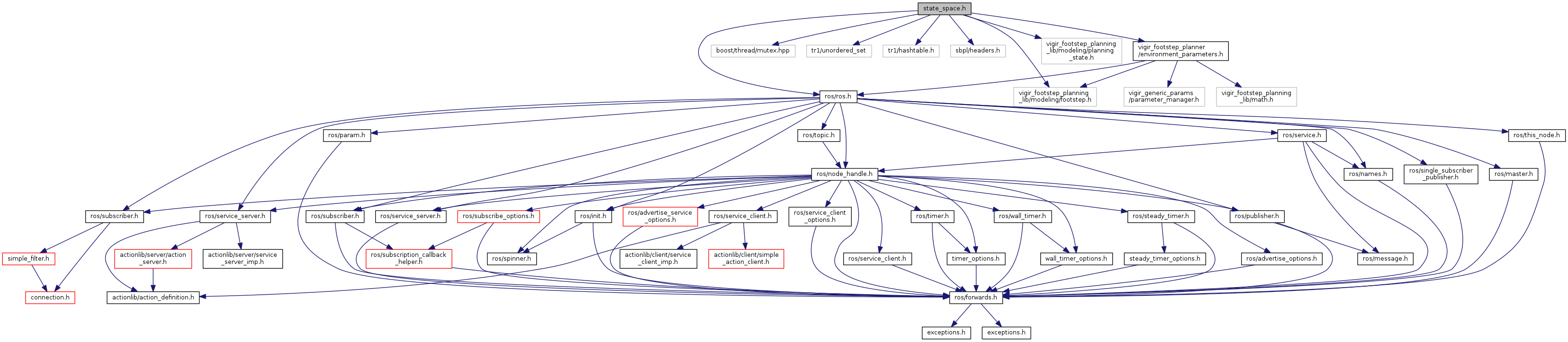
#include <ros/ros.h>#include <boost/thread/mutex.hpp>#include <tr1/unordered_set>#include <tr1/hashtable.h>#include <sbpl/headers.h>#include <vigir_footstep_planning_lib/modeling/footstep.h>#include <vigir_footstep_planning_lib/modeling/planning_state.h>#include <vigir_footstep_planner/environment_parameters.h>
Include dependency graph for state_space.h:
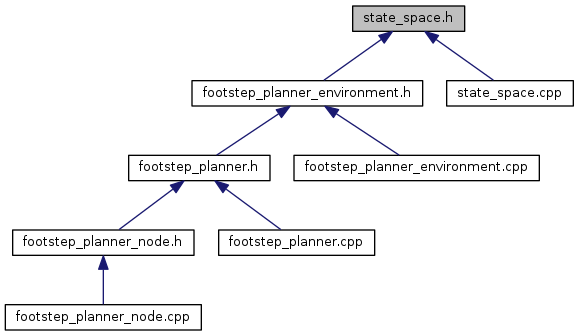
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | vigir_footstep_planning::IntPairHash |
| class | vigir_footstep_planning::StateSpace |
| struct | vigir_footstep_planning::StepCostPair |
Namespaces | |
| vigir_footstep_planning | |
Typedefs | |
| typedef exp_states_2d_t::const_iterator | vigir_footstep_planning::exp_states_2d_iter_t |
| typedef std::tr1::unordered_set< std::pair< int, int >, IntPairHash > | vigir_footstep_planning::exp_states_2d_t |
| typedef exp_states_t::const_iterator | vigir_footstep_planning::exp_states_iter_t |
| typedef std::vector< int > | vigir_footstep_planning::exp_states_t |