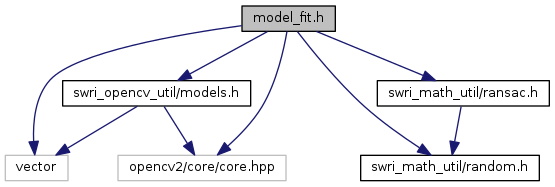
#include <vector>#include <opencv2/core/core.hpp>#include <swri_math_util/random.h>#include <swri_math_util/ransac.h>#include <swri_opencv_util/models.h>
Include dependency graph for model_fit.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| swri_opencv_util | |
Functions | |
| cv::Mat | swri_opencv_util::FindAffineTransform2d (const cv::Mat &points1, const cv::Mat &points2, cv::Mat &inliers1, cv::Mat &inliers2, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| CrossModel3d | swri_opencv_util::FindCross3d (const cv::Mat &points, cv::Mat &inliers, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t min_iterations=1, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| cv::Mat | swri_opencv_util::FindHomography (const cv::Mat &points1, const cv::Mat &points2, cv::Mat &inliers1, cv::Mat &inliers2, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| LineModel3d | swri_opencv_util::FindLine3d (const cv::Mat &points, cv::Mat &inliers, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t min_iterations=1, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| template<class Model > | |
| cv::Mat | swri_opencv_util::FindModel2d (const cv::Mat &points1, const cv::Mat &points2, cv::Mat &inliers1, cv::Mat &inliers2, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| LineModel3d | swri_opencv_util::FindOrthoLine3d (const cv::Mat &points, const LineModel3d &ortho, cv::Mat &inliers, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t min_iterations=1, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| PlaneModel | swri_opencv_util::FindPerpendicularPlaneWithPoint (const cv::Vec3f &point_on_plane, const cv::Vec3f &perp_axis, double max_angle_from_perp, const cv::Mat &points, cv::Mat &inliers, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error, double confidence, int32_t min_iterations, int32_t max_iterations, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| PlaneModel | swri_opencv_util::FindPlane (const cv::Mat &points, cv::Mat &inliers, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t min_iterations=1, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| cv::Mat | swri_opencv_util::FindRigidTransform2d (const cv::Mat &points1, const cv::Mat &points2, cv::Mat &inliers1, cv::Mat &inliers2, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| cv::Mat | swri_opencv_util::FindTranslation2d (const cv::Mat &points1, const cv::Mat &points2, cv::Mat &inliers1, cv::Mat &inliers2, std::vector< uint32_t > &good_points, int32_t &iterations, double max_error=1.0, double confidence=0.9, int32_t max_iterations=1000, swri_math_util::RandomGeneratorPtr rng=swri_math_util::RandomGeneratorPtr()) |
| cv::Mat | swri_opencv_util::FitAffineTransform2d (const cv::Mat &points1, const cv::Mat &points2) |
| LineModel3d | swri_opencv_util::FitLine3d (const cv::Mat &points) |
| PlaneModel | swri_opencv_util::FitPlane (const cv::Mat &points) |
| cv::Mat | swri_opencv_util::FitRigidTransform2d (const cv::Mat &points1, const cv::Mat &points2) |
| cv::Mat | swri_opencv_util::FitRotation3d (const cv::Mat &points1, const cv::Mat &points2) |