This file contains all the functions prototypes for the CAN firmware library. More...
#include "stm32f4xx.h"
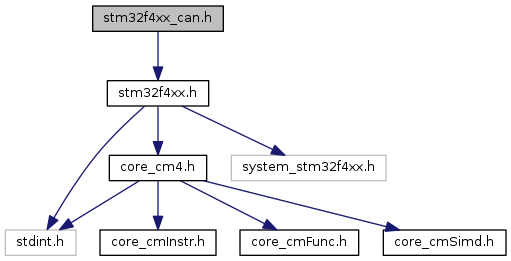
Include dependency graph for stm32f4xx_can.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | CAN_FilterInitTypeDef |
| CAN filter init structure definition. More... | |
| struct | CAN_InitTypeDef |
| CAN init structure definition. More... | |
| struct | CanRxMsg |
| CAN Rx message structure definition. More... | |
| struct | CanTxMsg |
| CAN Tx message structure definition. More... | |
Macros | |
| #define | CAN_BS1_10tq ((uint8_t)0x09) |
| #define | CAN_BS1_11tq ((uint8_t)0x0A) |
| #define | CAN_BS1_12tq ((uint8_t)0x0B) |
| #define | CAN_BS1_13tq ((uint8_t)0x0C) |
| #define | CAN_BS1_14tq ((uint8_t)0x0D) |
| #define | CAN_BS1_15tq ((uint8_t)0x0E) |
| #define | CAN_BS1_16tq ((uint8_t)0x0F) |
| #define | CAN_BS1_1tq ((uint8_t)0x00) |
| #define | CAN_BS1_2tq ((uint8_t)0x01) |
| #define | CAN_BS1_3tq ((uint8_t)0x02) |
| #define | CAN_BS1_4tq ((uint8_t)0x03) |
| #define | CAN_BS1_5tq ((uint8_t)0x04) |
| #define | CAN_BS1_6tq ((uint8_t)0x05) |
| #define | CAN_BS1_7tq ((uint8_t)0x06) |
| #define | CAN_BS1_8tq ((uint8_t)0x07) |
| #define | CAN_BS1_9tq ((uint8_t)0x08) |
| #define | CAN_BS2_1tq ((uint8_t)0x00) |
| #define | CAN_BS2_2tq ((uint8_t)0x01) |
| #define | CAN_BS2_3tq ((uint8_t)0x02) |
| #define | CAN_BS2_4tq ((uint8_t)0x03) |
| #define | CAN_BS2_5tq ((uint8_t)0x04) |
| #define | CAN_BS2_6tq ((uint8_t)0x05) |
| #define | CAN_BS2_7tq ((uint8_t)0x06) |
| #define | CAN_BS2_8tq ((uint8_t)0x07) |
| #define | CAN_ErrorCode_ACKErr ((uint8_t)0x30) |
| #define | CAN_ErrorCode_BitDominantErr ((uint8_t)0x50) |
| #define | CAN_ErrorCode_BitRecessiveErr ((uint8_t)0x40) |
| #define | CAN_ErrorCode_CRCErr ((uint8_t)0x60) |
| #define | CAN_ErrorCode_FormErr ((uint8_t)0x20) |
| #define | CAN_ErrorCode_NoErr ((uint8_t)0x00) |
| #define | CAN_ErrorCode_SoftwareSetErr ((uint8_t)0x70) |
| #define | CAN_ErrorCode_StuffErr ((uint8_t)0x10) |
| #define | CAN_FIFO0 ((uint8_t)0x00) |
| #define | CAN_FIFO1 ((uint8_t)0x01) |
| #define | CAN_Filter_FIFO0 ((uint8_t)0x00) |
| #define | CAN_Filter_FIFO1 ((uint8_t)0x01) |
| #define | CAN_FilterFIFO0 CAN_Filter_FIFO0 |
| #define | CAN_FilterFIFO1 CAN_Filter_FIFO1 |
| #define | CAN_FilterMode_IdList ((uint8_t)0x01) |
| #define | CAN_FilterMode_IdMask ((uint8_t)0x00) |
| #define | CAN_FilterScale_16bit ((uint8_t)0x00) |
| #define | CAN_FilterScale_32bit ((uint8_t)0x01) |
| #define | CAN_FLAG_BOF ((uint32_t)0x10F00004) |
| #define | CAN_FLAG_EPV ((uint32_t)0x10F00002) |
| #define | CAN_FLAG_EWG ((uint32_t)0x10F00001) |
| #define | CAN_FLAG_FF0 ((uint32_t)0x32000008) |
| #define | CAN_FLAG_FF1 ((uint32_t)0x34000008) |
| #define | CAN_FLAG_FMP0 ((uint32_t)0x12000003) |
| #define | CAN_FLAG_FMP1 ((uint32_t)0x14000003) |
| #define | CAN_FLAG_FOV0 ((uint32_t)0x32000010) |
| #define | CAN_FLAG_FOV1 ((uint32_t)0x34000010) |
| #define | CAN_FLAG_LEC ((uint32_t)0x30F00070) |
| #define | CAN_FLAG_RQCP0 ((uint32_t)0x38000001) |
| #define | CAN_FLAG_RQCP1 ((uint32_t)0x38000100) |
| #define | CAN_FLAG_RQCP2 ((uint32_t)0x38010000) |
| #define | CAN_FLAG_SLAK ((uint32_t)0x31000012) |
| #define | CAN_FLAG_WKU ((uint32_t)0x31000008) |
| #define | CAN_ID_EXT CAN_Id_Extended |
| #define | CAN_Id_Extended ((uint32_t)0x00000004) |
| #define | CAN_Id_Standard ((uint32_t)0x00000000) |
| #define | CAN_ID_STD CAN_Id_Standard |
| #define | CAN_InitStatus_Failed ((uint8_t)0x00) |
| #define | CAN_InitStatus_Success ((uint8_t)0x01) |
| #define | CAN_IT_BOF ((uint32_t)0x00000400) |
| #define | CAN_IT_EPV ((uint32_t)0x00000200) |
| #define | CAN_IT_ERR ((uint32_t)0x00008000) |
| #define | CAN_IT_EWG ((uint32_t)0x00000100) |
| #define | CAN_IT_FF0 ((uint32_t)0x00000004) |
| #define | CAN_IT_FF1 ((uint32_t)0x00000020) |
| #define | CAN_IT_FMP0 ((uint32_t)0x00000002) |
| #define | CAN_IT_FMP1 ((uint32_t)0x00000010) |
| #define | CAN_IT_FOV0 ((uint32_t)0x00000008) |
| #define | CAN_IT_FOV1 ((uint32_t)0x00000040) |
| #define | CAN_IT_LEC ((uint32_t)0x00000800) |
| #define | CAN_IT_RQCP0 CAN_IT_TME |
| #define | CAN_IT_RQCP1 CAN_IT_TME |
| #define | CAN_IT_RQCP2 CAN_IT_TME |
| #define | CAN_IT_SLK ((uint32_t)0x00020000) |
| #define | CAN_IT_TME ((uint32_t)0x00000001) |
| #define | CAN_IT_WKU ((uint32_t)0x00010000) |
| #define | CAN_Mode_LoopBack ((uint8_t)0x01) |
| #define | CAN_Mode_Normal ((uint8_t)0x00) |
| #define | CAN_Mode_Silent ((uint8_t)0x02) |
| #define | CAN_Mode_Silent_LoopBack ((uint8_t)0x03) |
| #define | CAN_ModeStatus_Failed ((uint8_t)0x00) |
| #define | CAN_ModeStatus_Success ((uint8_t)!CAN_ModeStatus_Failed) |
| #define | CAN_NO_MB CAN_TxStatus_NoMailBox |
| #define | CAN_OperatingMode_Initialization ((uint8_t)0x00) |
| #define | CAN_OperatingMode_Normal ((uint8_t)0x01) |
| #define | CAN_OperatingMode_Sleep ((uint8_t)0x02) |
| #define | CAN_RTR_Data ((uint32_t)0x00000000) |
| #define | CAN_RTR_DATA CAN_RTR_Data |
| #define | CAN_RTR_Remote ((uint32_t)0x00000002) |
| #define | CAN_RTR_REMOTE CAN_RTR_Remote |
| #define | CAN_SJW_1tq ((uint8_t)0x00) |
| #define | CAN_SJW_2tq ((uint8_t)0x01) |
| #define | CAN_SJW_3tq ((uint8_t)0x02) |
| #define | CAN_SJW_4tq ((uint8_t)0x03) |
| #define | CAN_Sleep_Failed ((uint8_t)0x00) |
| #define | CAN_Sleep_Ok ((uint8_t)0x01) |
| #define | CAN_TxStatus_Failed ((uint8_t)0x00) |
| #define | CAN_TxStatus_NoMailBox ((uint8_t)0x04) |
| #define | CAN_TxStatus_Ok ((uint8_t)0x01) |
| #define | CAN_TxStatus_Pending ((uint8_t)0x02) |
| #define | CAN_WakeUp_Failed ((uint8_t)0x00) |
| #define | CAN_WakeUp_Ok ((uint8_t)0x01) |
| #define | CANINITFAILED CAN_InitStatus_Failed |
| #define | CANINITOK CAN_InitStatus_Success |
| #define | CANSLEEPFAILED CAN_Sleep_Failed |
| #define | CANSLEEPOK CAN_Sleep_Ok |
| #define | CANTXFAILED CAN_TxStatus_Failed |
| #define | CANTXOK CAN_TxStatus_Ok |
| #define | CANTXPENDING CAN_TxStatus_Pending |
| #define | CANWAKEUPFAILED CAN_WakeUp_Failed |
| #define | CANWAKEUPOK CAN_WakeUp_Ok |
| #define | IS_CAN_ALL_PERIPH(PERIPH) |
| #define | IS_CAN_BANKNUMBER(BANKNUMBER) (((BANKNUMBER) >= 1) && ((BANKNUMBER) <= 27)) |
| #define | IS_CAN_BS1(BS1) ((BS1) <= CAN_BS1_16tq) |
| #define | IS_CAN_BS2(BS2) ((BS2) <= CAN_BS2_8tq) |
| #define | IS_CAN_CLEAR_FLAG(FLAG) |
| #define | IS_CAN_CLEAR_IT(IT) |
| #define | IS_CAN_DLC(DLC) ((DLC) <= ((uint8_t)0x08)) |
| #define | IS_CAN_EXTID(EXTID) ((EXTID) <= ((uint32_t)0x1FFFFFFF)) |
| #define | IS_CAN_FIFO(FIFO) (((FIFO) == CAN_FIFO0) || ((FIFO) == CAN_FIFO1)) |
| #define | IS_CAN_FILTER_FIFO(FIFO) |
| #define | IS_CAN_FILTER_MODE(MODE) |
| #define | IS_CAN_FILTER_NUMBER(NUMBER) ((NUMBER) <= 27) |
| #define | IS_CAN_FILTER_SCALE(SCALE) |
| #define | IS_CAN_GET_FLAG(FLAG) |
| #define | IS_CAN_IDTYPE(IDTYPE) |
| #define | IS_CAN_IT(IT) |
| #define | IS_CAN_MODE(MODE) |
| #define | IS_CAN_OPERATING_MODE(MODE) |
| #define | IS_CAN_PRESCALER(PRESCALER) (((PRESCALER) >= 1) && ((PRESCALER) <= 1024)) |
| #define | IS_CAN_RTR(RTR) (((RTR) == CAN_RTR_Data) || ((RTR) == CAN_RTR_Remote)) |
| #define | IS_CAN_SJW(SJW) |
| #define | IS_CAN_STDID(STDID) ((STDID) <= ((uint32_t)0x7FF)) |
| #define | IS_CAN_TRANSMITMAILBOX(TRANSMITMAILBOX) ((TRANSMITMAILBOX) <= ((uint8_t)0x02)) |
Functions | |
| void | CAN_CancelTransmit (CAN_TypeDef *CANx, uint8_t Mailbox) |
| Cancels a transmit request. More... | |
| void | CAN_ClearFlag (CAN_TypeDef *CANx, uint32_t CAN_FLAG) |
| Clears the CAN's pending flags. More... | |
| void | CAN_ClearITPendingBit (CAN_TypeDef *CANx, uint32_t CAN_IT) |
| Clears the CANx's interrupt pending bits. More... | |
| void | CAN_DBGFreeze (CAN_TypeDef *CANx, FunctionalState NewState) |
| Enables or disables the DBG Freeze for CAN. More... | |
| void | CAN_DeInit (CAN_TypeDef *CANx) |
| Deinitializes the CAN peripheral registers to their default reset values. More... | |
| void | CAN_FIFORelease (CAN_TypeDef *CANx, uint8_t FIFONumber) |
| Releases the specified receive FIFO. More... | |
| void | CAN_FilterInit (CAN_FilterInitTypeDef *CAN_FilterInitStruct) |
| Configures the CAN reception filter according to the specified parameters in the CAN_FilterInitStruct. More... | |
| FlagStatus | CAN_GetFlagStatus (CAN_TypeDef *CANx, uint32_t CAN_FLAG) |
| Checks whether the specified CAN flag is set or not. More... | |
| ITStatus | CAN_GetITStatus (CAN_TypeDef *CANx, uint32_t CAN_IT) |
| Checks whether the specified CANx interrupt has occurred or not. More... | |
| uint8_t | CAN_GetLastErrorCode (CAN_TypeDef *CANx) |
| Returns the CANx's last error code (LEC). More... | |
| uint8_t | CAN_GetLSBTransmitErrorCounter (CAN_TypeDef *CANx) |
| Returns the LSB of the 9-bit CANx Transmit Error Counter(TEC). More... | |
| uint8_t | CAN_GetReceiveErrorCounter (CAN_TypeDef *CANx) |
| Returns the CANx Receive Error Counter (REC). More... | |
| uint8_t | CAN_Init (CAN_TypeDef *CANx, CAN_InitTypeDef *CAN_InitStruct) |
| Initializes the CAN peripheral according to the specified parameters in the CAN_InitStruct. More... | |
| void | CAN_ITConfig (CAN_TypeDef *CANx, uint32_t CAN_IT, FunctionalState NewState) |
| Enables or disables the specified CANx interrupts. More... | |
| uint8_t | CAN_MessagePending (CAN_TypeDef *CANx, uint8_t FIFONumber) |
| Returns the number of pending received messages. More... | |
| uint8_t | CAN_OperatingModeRequest (CAN_TypeDef *CANx, uint8_t CAN_OperatingMode) |
| Selects the CAN Operation mode. More... | |
| void | CAN_Receive (CAN_TypeDef *CANx, uint8_t FIFONumber, CanRxMsg *RxMessage) |
| Receives a correct CAN frame. More... | |
| void | CAN_SlaveStartBank (uint8_t CAN_BankNumber) |
| Select the start bank filter for slave CAN. More... | |
| uint8_t | CAN_Sleep (CAN_TypeDef *CANx) |
| Enters the Sleep (low power) mode. More... | |
| void | CAN_StructInit (CAN_InitTypeDef *CAN_InitStruct) |
| Fills each CAN_InitStruct member with its default value. More... | |
| uint8_t | CAN_Transmit (CAN_TypeDef *CANx, CanTxMsg *TxMessage) |
| Initiates and transmits a CAN frame message. More... | |
| uint8_t | CAN_TransmitStatus (CAN_TypeDef *CANx, uint8_t TransmitMailbox) |
| Checks the transmission status of a CAN Frame. More... | |
| void | CAN_TTComModeCmd (CAN_TypeDef *CANx, FunctionalState NewState) |
| Enables or disables the CAN Time TriggerOperation communication mode. More... | |
| uint8_t | CAN_WakeUp (CAN_TypeDef *CANx) |
| Wakes up the CAN peripheral from sleep mode . More... | |
Detailed Description
This file contains all the functions prototypes for the CAN firmware library.
- Version
- V1.1.0
- Date
- 11-January-2013
- Attention
© COPYRIGHT 2013 STMicroelectronics
Licensed under MCD-ST Liberty SW License Agreement V2, (the "License"); You may not use this file except in compliance with the License. You may obtain a copy of the License at:
http://www.st.com/software_license_agreement_liberty_v2
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Definition in file stm32f4xx_can.h.