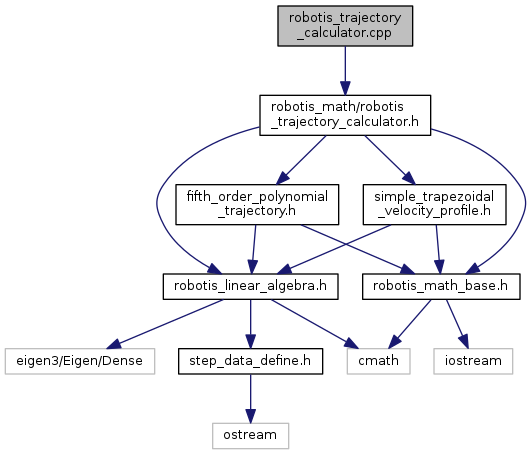
#include "robotis_math/robotis_trajectory_calculator.h"
Include dependency graph for robotis_trajectory_calculator.cpp:
Go to the source code of this file.
Namespaces | |
| robotis_framework | |
Functions | |
| Eigen::MatrixXd | robotis_framework::calcArc3dTra (double smp_time, double mov_time, Eigen::MatrixXd center_point, Eigen::MatrixXd normal_vector, Eigen::MatrixXd start_point, double rotation_angle, double cross_ratio) |
| Eigen::MatrixXd | robotis_framework::calcMinimumJerkTra (double pos_start, double vel_start, double accel_start, double pos_end, double vel_end, double accel_end, double smp_time, double mov_time) |
| Eigen::MatrixXd | robotis_framework::calcMinimumJerkTraPlus (double pos_start, double vel_start, double accel_start, double pos_end, double vel_end, double accel_end, double smp_time, double mov_time) |
| Eigen::MatrixXd | robotis_framework::calcMinimumJerkTraWithViaPoints (int via_num, double pos_start, double vel_start, double accel_start, Eigen::MatrixXd pos_via, Eigen::MatrixXd vel_via, Eigen::MatrixXd accel_via, double pos_end, double vel_end, double accel_end, double smp_time, Eigen::MatrixXd via_time, double mov_time) |
| Eigen::MatrixXd | robotis_framework::calcMinimumJerkTraWithViaPointsPosition (int via_num, double pos_start, double vel_start, double accel_start, Eigen::MatrixXd pos_via, double pos_end, double vel_end, double accel_end, double smp_time, Eigen::MatrixXd via_time, double mov_time) |