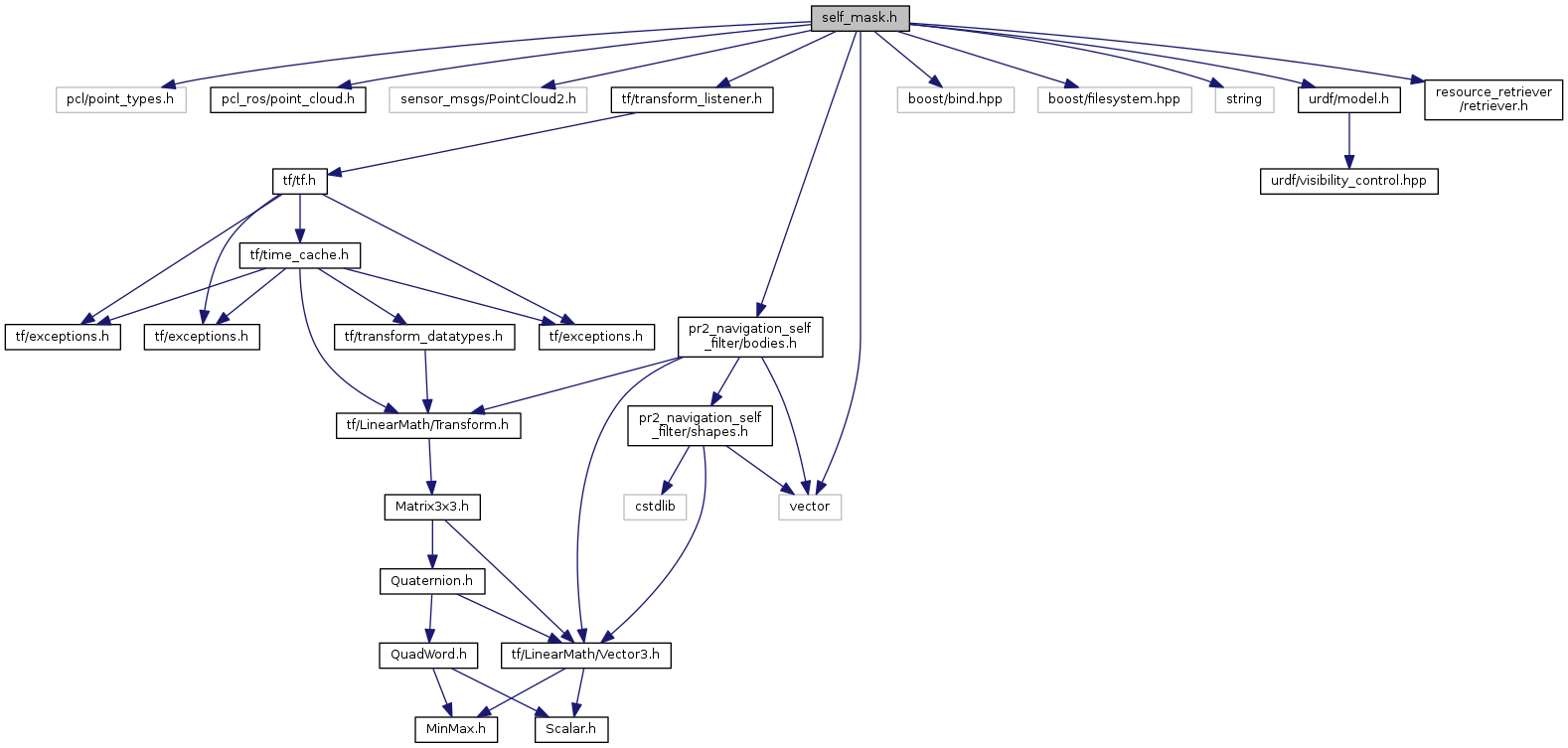
#include <pcl/point_types.h>#include <pcl_ros/point_cloud.h>#include <sensor_msgs/PointCloud2.h>#include <pr2_navigation_self_filter/bodies.h>#include <tf/transform_listener.h>#include <boost/bind.hpp>#include <boost/filesystem.hpp>#include <string>#include <vector>#include <urdf/model.h>#include <resource_retriever/retriever.h>
Include dependency graph for self_mask.h:
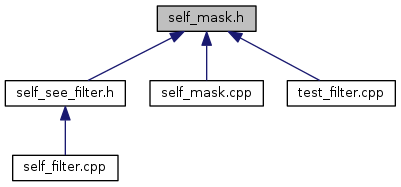
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | robot_self_filter::LinkInfo |
| struct | robot_self_filter::SelfMask< PointT >::SeeLink |
| class | robot_self_filter::SelfMask< PointT > |
| Computing a mask for a pointcloud that states which points are inside the robot. More... | |
| struct | robot_self_filter::SelfMask< PointT >::SortBodies |
Namespaces | |
| robot_self_filter | |
Enumerations | |
| enum | { robot_self_filter::INSIDE = 0, robot_self_filter::OUTSIDE = 1, robot_self_filter::SHADOW = 2 } |
| The possible values of a mask computed for a point. More... | |
Functions | |
| static shapes::Shape * | robot_self_filter::constructShape (const urdf::Geometry *geom) |
| static tf::Transform | robot_self_filter::urdfPose2TFTransform (const urdf::Pose &pose) |