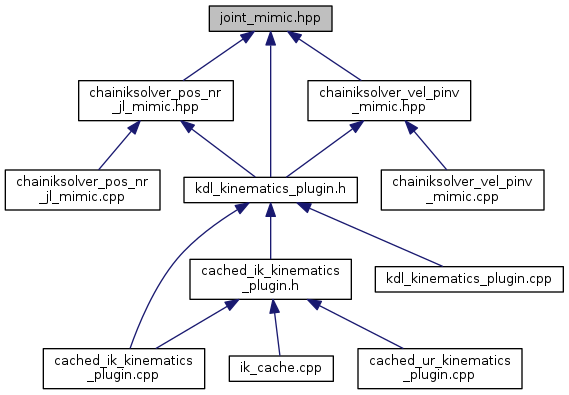
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | kdl_kinematics_plugin::JointMimic |
| A model of a mimic joint. Mimic joints are typically unactuated joints that are constrained to follow the motion of another joint. The constraint is linear, i.e. joint_angle_constrained_joint = joint_angle_mimicked_joint*multiplier + offset. More... | |
Namespaces | |
| kdl_kinematics_plugin | |