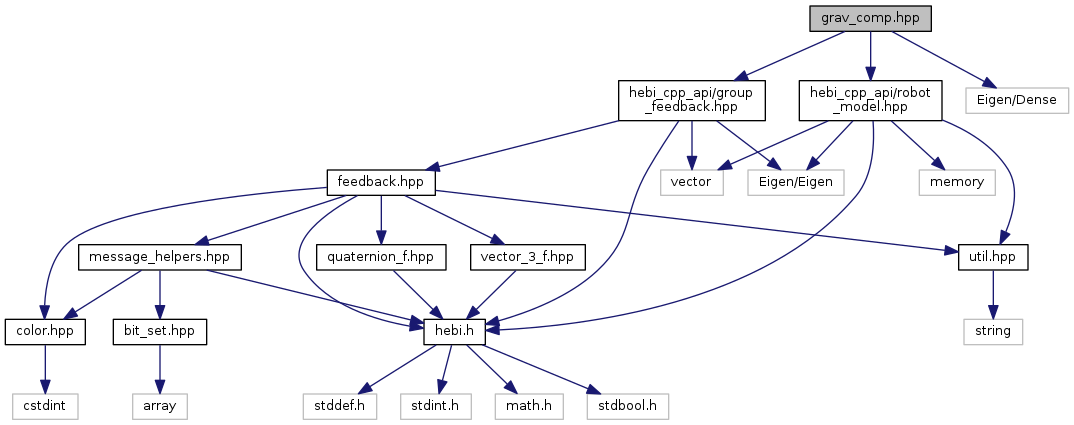
#include "hebi_cpp_api/robot_model.hpp"#include "hebi_cpp_api/group_feedback.hpp"#include "Eigen/Dense"
Include dependency graph for grav_comp.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| hebi | |
| hebi::util | |
Functions | |
| static Eigen::VectorXd | hebi::util::getGravCompEfforts (const hebi::robot_model::RobotModel &model, const Eigen::VectorXd &masses, const hebi::GroupFeedback &feedback) |