3*3 matrix representation of SO(3) More...
#include <gtsam/geometry/SOn.h>#include <gtsam/base/Lie.h>#include <gtsam/base/Matrix.h>#include <gtsam/dllexport.h>#include <cmath>#include <vector>
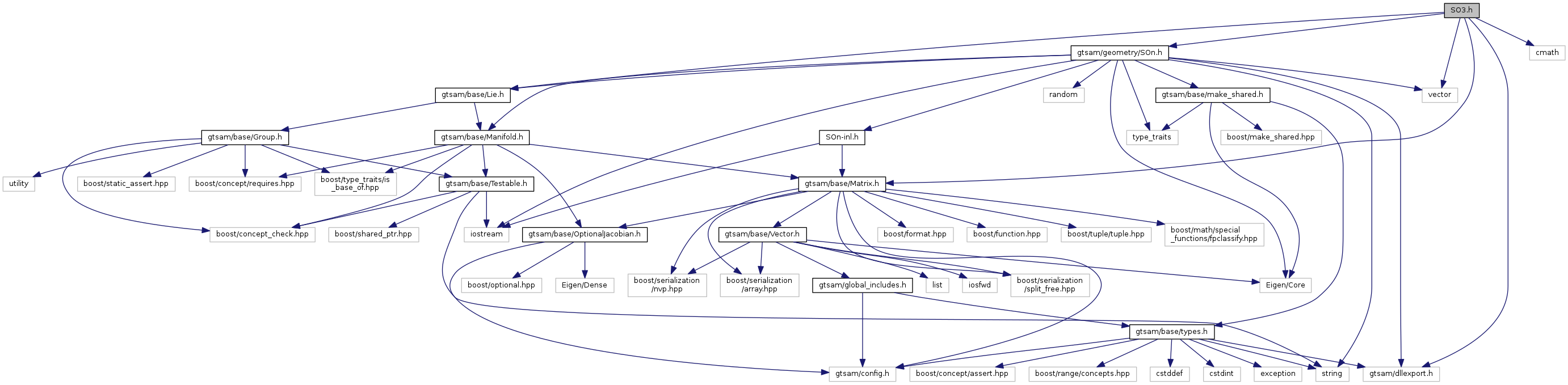
Include dependency graph for SO3.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::so3::DexpFunctor |
| Functor that implements Exponential map and its derivatives. More... | |
| class | gtsam::so3::ExpmapFunctor |
| Functor implementing Exponential map. More... | |
| struct | gtsam::traits< const SO3 > |
| struct | gtsam::traits< SO3 > |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::so3 | |
Typedefs | |
| using | gtsam::SO3 = SO< 3 > |
Functions | |
| GTSAM_EXPORT Matrix3 | gtsam::so3::compose (const Matrix3 &M, const SO3 &R, OptionalJacobian< 9, 9 > H) |
| GTSAM_EXPORT Matrix99 | gtsam::so3::Dcompose (const SO3 &R) |
| (constant) Jacobian of compose wrpt M More... | |
| template<class Archive > | |
| void | gtsam::serialize (Archive &ar, SO3 &R, const unsigned int) |