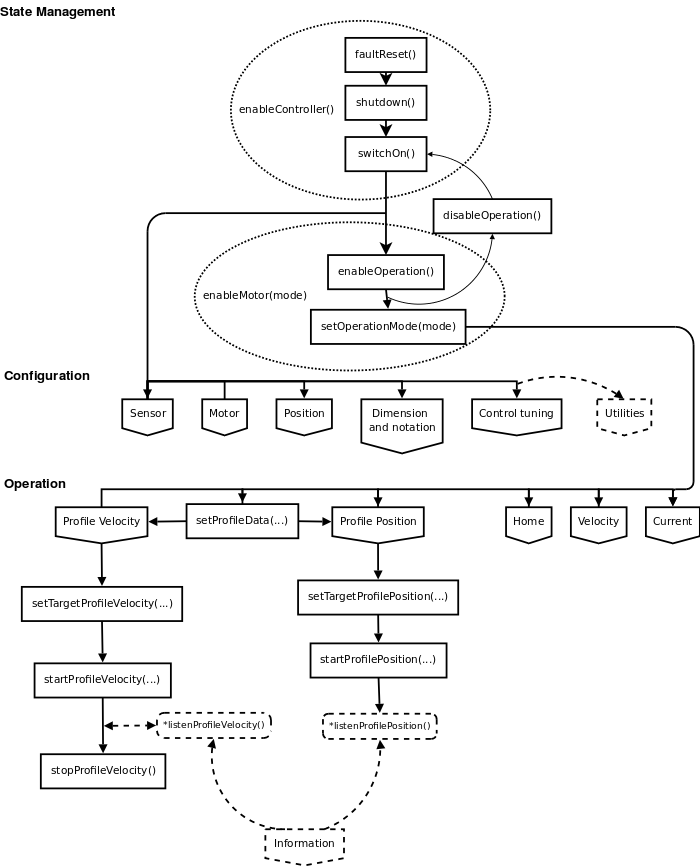
This diagram shows how to start to operate with EPOS2 using IRI EPOS2.
To start any motor operation with epos it needs to be in Operation Enabled State which gives power to the motor, if we want to have the motor without power we will do a disableOperation() to reach a non-powered motor state. (Switch On, just do an enableOperation() to give power again )
If we want to do an operation (velocity, profile_velocity, profile_position) is needed set the operation mode first, set the target and the options (velocity profile ) and then start and stop if it is needed.
For Profile Position mode its necessary to give the type of movement (absolute, relative) and if it will be blocking the program or not (if not, it may be necessary to know if position desired is reached with isTargetReached())
For more information, operation_modes