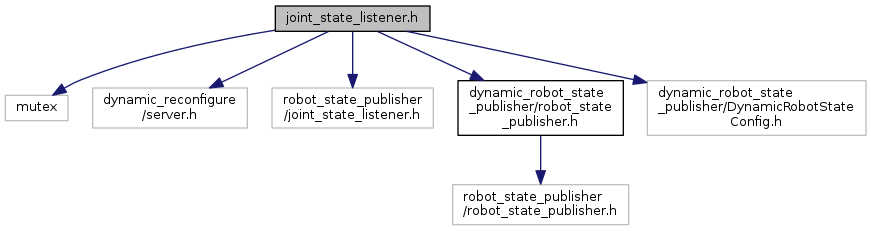
#include <mutex>#include <dynamic_reconfigure/server.h>#include <robot_state_publisher/joint_state_listener.h>#include <dynamic_robot_state_publisher/robot_state_publisher.h>#include <dynamic_robot_state_publisher/DynamicRobotStateConfig.h>
Include dependency graph for joint_state_listener.h:
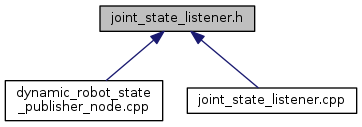
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robot_state_publisher::DynamicJointStateListener |
A joint state listener that first reads the robot model from (static) robot_description parameter, and then watches the dynamic model at robot_state_publisher/robot_description. When the dynamic model changes, this listener reloads the 3D representation of the model. More... | |
Namespaces | |
| robot_state_publisher | |