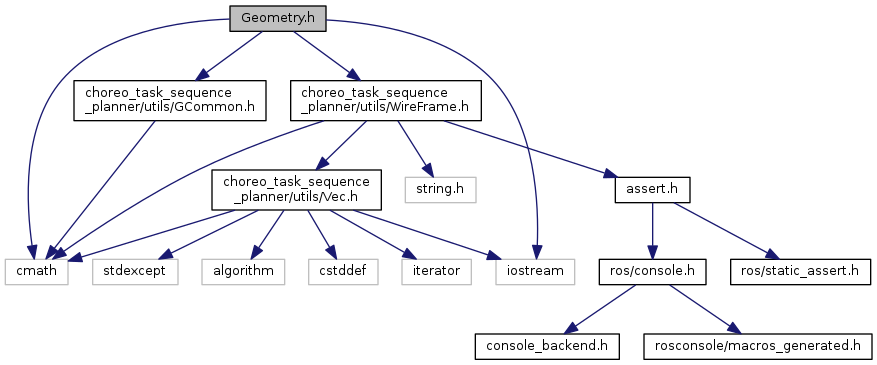
#include <cmath>#include <iostream>#include "choreo_task_sequence_planner/utils/GCommon.h"#include "choreo_task_sequence_planner/utils/WireFrame.h"
Include dependency graph for Geometry.h:
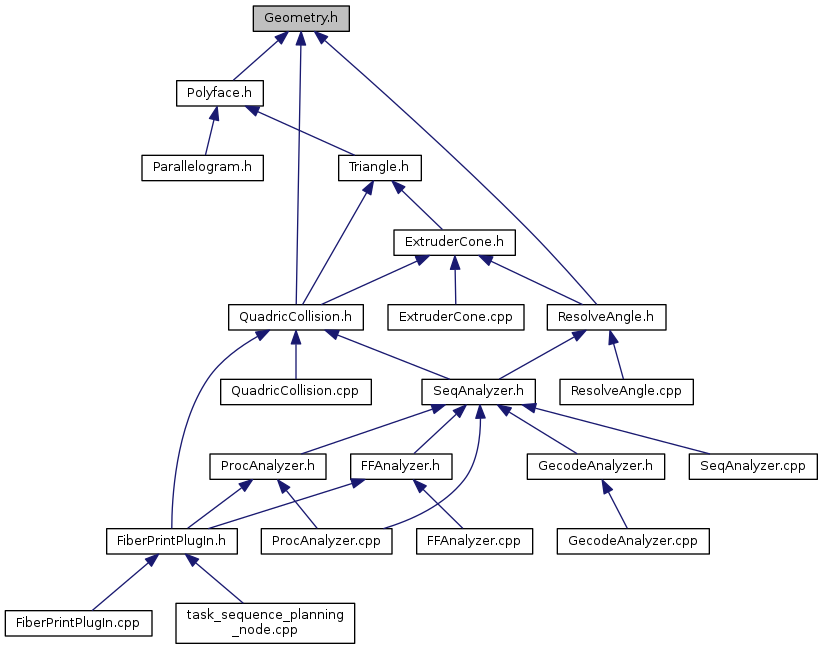
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Geometry::Vector3d |
Namespaces | |
| Geometry | |
Functions | |
| static double | Geometry::angle (Vector3d vec1, Vector3d vec2) |
| static void | Geometry::changeCoordinate (Vector3d &point, Vector3d coord[3]) |
| static void | Geometry::changeCoordinate (Vector3d &point, Vector3d coord[3], Vector3d origin) |
| static Vector3d | Geometry::cross (Vector3d vec1, Vector3d vec2) |
| static double | Geometry::dot (Vector3d vec1, Vector3d vec2) |
Variables | |
| static double | Geometry::inf = 10000000 |
| static double | Geometry::ninf = -10000000 |