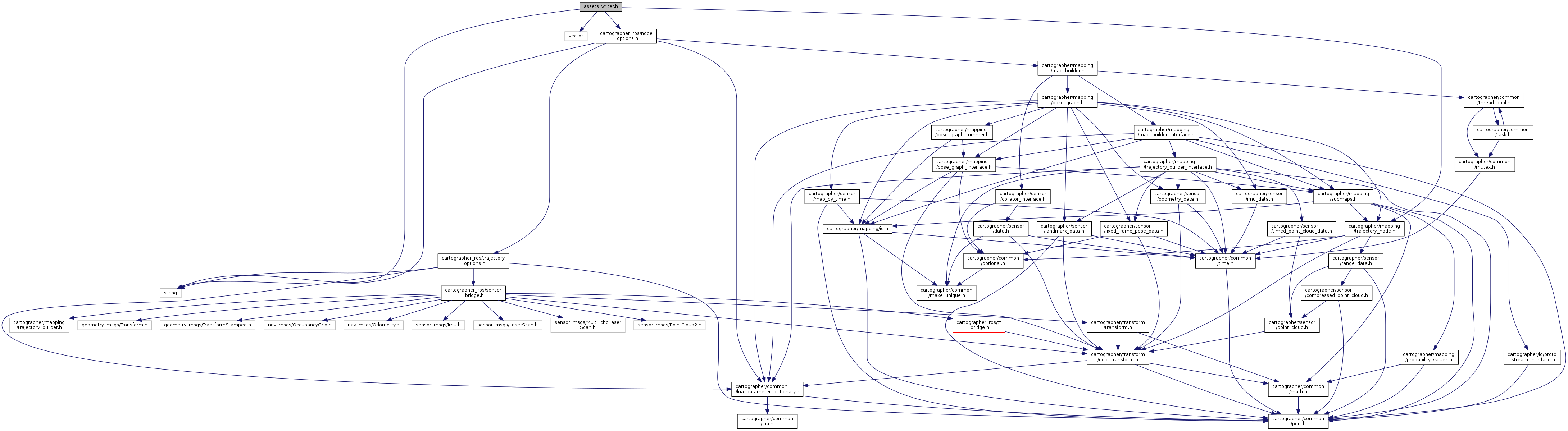
#include <string>#include <vector>#include "cartographer/mapping/trajectory_node.h"#include "cartographer_ros/node_options.h"
Include dependency graph for assets_writer.h:
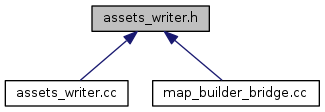
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| cartographer_ros | |
Functions | |
| void | cartographer_ros::Write2DAssets (const std::vector<::cartographer::mapping::TrajectoryNode > &trajectory_nodes, const string &map_frame, const ::cartographer::mapping_2d::proto::SubmapsOptions &submaps_options, const std::string &stem) |
| void | cartographer_ros::Write3DAssets (const std::vector<::cartographer::mapping::TrajectoryNode > &trajectory_nodes, const double voxel_size, const std::string &stem) |