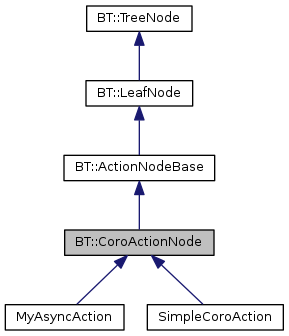
The CoroActionNode class is an ideal candidate for asynchronous actions which need to communicate with an external service using an asynch request/reply interface (being notable examples ActionLib in ROS, MoveIt clients or move_base clients). More...
#include <action_node.h>
Classes | |
| struct | Pimpl |
Public Member Functions | |
| CoroActionNode (const std::string &name, const NodeConfiguration &config) | |
| virtual NodeStatus | executeTick () overridefinal |
| The method that should be used to invoke tick() and setStatus();. More... | |
| void | halt () override |
| void | setStatusRunningAndYield () |
| Use this method to return RUNNING and temporary "pause" the Action. More... | |
| virtual | ~CoroActionNode () override |
 Public Member Functions inherited from BT::ActionNodeBase Public Member Functions inherited from BT::ActionNodeBase | |
| ActionNodeBase (const std::string &name, const NodeConfiguration &config) | |
| virtual NodeType | type () const overridefinal |
| ~ActionNodeBase () override=default | |
| Public Member Functions inherited from BT::LeafNode | |
| LeafNode (const std::string &name, const NodeConfiguration &config) | |
| virtual | ~LeafNode () override=default |
| Public Member Functions inherited from BT::TreeNode | |
| const NodeConfiguration & | config () const |
| template<typename T > | |
| Result | getInput (const std::string &key, T &destination) const |
| template<typename T > | |
| Optional< T > | getInput (const std::string &key) const |
| StringView | getRawPortValue (const std::string &key) const |
| bool | isHalted () const |
| const std::string & | name () const |
| Name of the instance, not the type. More... | |
| const std::string & | registrationName () const |
| registrationName is the ID used by BehaviorTreeFactory to create an instance. More... | |
| template<typename T > | |
| Result | setOutput (const std::string &key, const T &value) |
| NodeStatus | status () const |
| StatusChangeSubscriber | subscribeToStatusChange (StatusChangeCallback callback) |
| subscribeToStatusChange is used to attach a callback to a status change. When StatusChangeSubscriber goes out of scope (it is a shared_ptr) the callback is unsubscribed automatically. More... | |
| TreeNode (std::string name, NodeConfiguration config) | |
| TreeNode main constructor. More... | |
| uint16_t | UID () const |
| BT::NodeStatus | waitValidStatus () |
| virtual | ~TreeNode ()=default |
Protected Attributes | |
| std::unique_ptr< Pimpl > | _p |
Additional Inherited Members | |
| Public Types inherited from BT::TreeNode | |
| typedef std::shared_ptr< TreeNode > | Ptr |
| using | StatusChangeCallback = StatusChangeSignal::CallableFunction |
| using | StatusChangeSignal = Signal< TimePoint, const TreeNode &, NodeStatus, NodeStatus > |
| using | StatusChangeSubscriber = StatusChangeSignal::Subscriber |
| Static Public Member Functions inherited from BT::TreeNode | |
| static Optional< StringView > | getRemappedKey (StringView port_name, StringView remapping_value) |
| static bool | isBlackboardPointer (StringView str) |
| static StringView | stripBlackboardPointer (StringView str) |
| Protected Member Functions inherited from BT::TreeNode | |
| void | modifyPortsRemapping (const PortsRemapping &new_remapping) |
| void | setRegistrationID (StringView ID) |
| void | setStatus (NodeStatus new_status) |
| virtual BT::NodeStatus | tick ()=0 |
| Method to be implemented by the user. More... | |
Detailed Description
The CoroActionNode class is an ideal candidate for asynchronous actions which need to communicate with an external service using an asynch request/reply interface (being notable examples ActionLib in ROS, MoveIt clients or move_base clients).
It is up to the user to decide when to suspend execution of the Action and resume the parent node, invoking the method setStatusRunningAndYield().
Definition at line 190 of file action_node.h.
Constructor & Destructor Documentation
| CoroActionNode::CoroActionNode | ( | const std::string & | name, |
| const NodeConfiguration & | config | ||
| ) |
Definition at line 88 of file action_node.cpp.
|
overridevirtual |
Definition at line 98 of file action_node.cpp.
Member Function Documentation
|
finaloverridevirtual |
The method that should be used to invoke tick() and setStatus();.
Reimplemented from BT::TreeNode.
Definition at line 108 of file action_node.cpp.
|
overridevirtual |
You may want to override this method. But still, remember to call this implementation too.
Example:
void MyAction::halt()
{
// do your stuff here
CoroActionNode::halt();
}
Implements BT::TreeNode.
Reimplemented in SimpleCoroAction.
Definition at line 124 of file action_node.cpp.
| void CoroActionNode::setStatusRunningAndYield | ( | ) |
Use this method to return RUNNING and temporary "pause" the Action.
Definition at line 102 of file action_node.cpp.
Member Data Documentation
|
protected |
Definition at line 218 of file action_node.h.
The documentation for this class was generated from the following files: