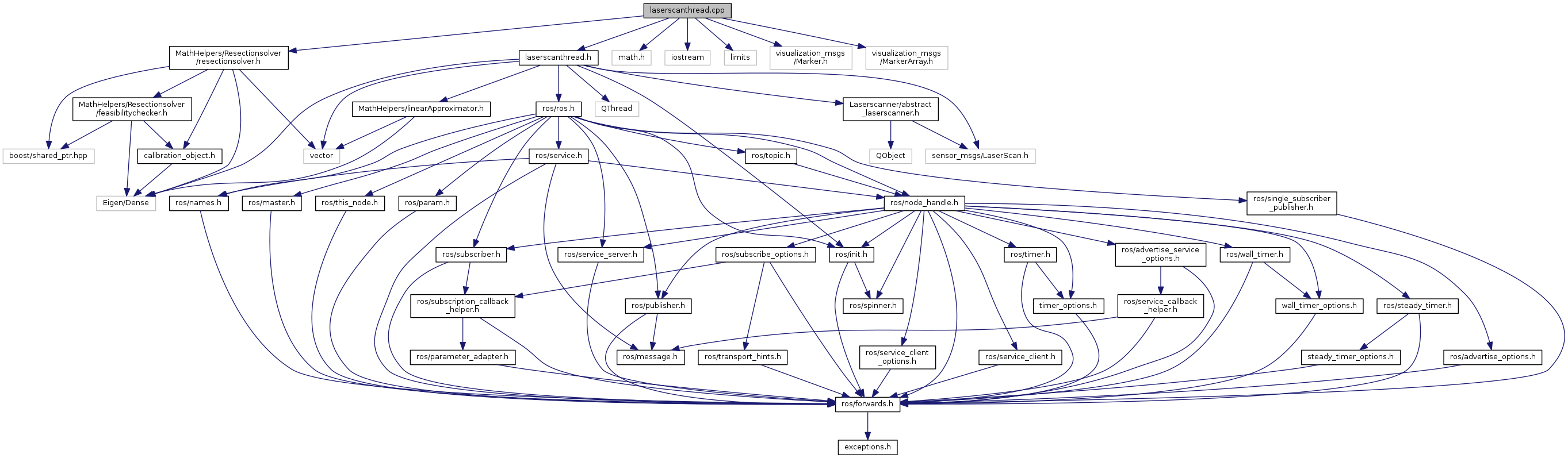
#include <laserscanthread.h>#include <math.h>#include <iostream>#include <limits>#include <MathHelpers/Resectionsolver/resectionsolver.h>#include <visualization_msgs/Marker.h>#include <visualization_msgs/MarkerArray.h>
Include dependency graph for laserscanthread.cpp: