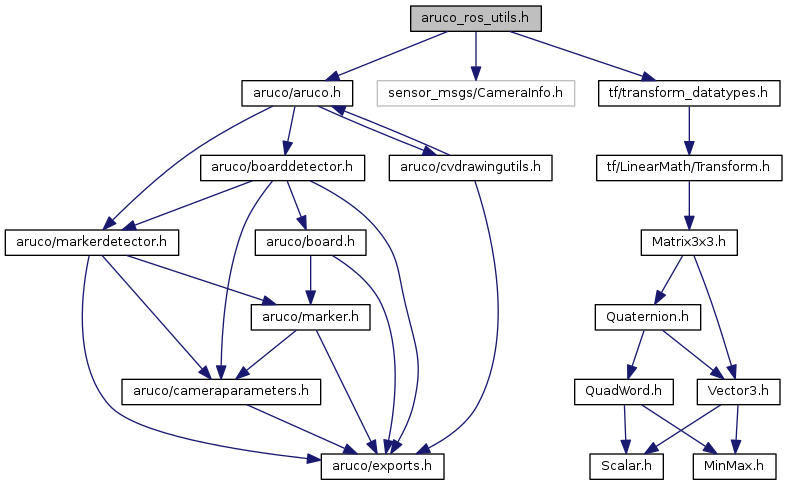
Include dependency graph for aruco_ros_utils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| aruco_ros | |
Functions | |
| tf::Transform | aruco_ros::arucoMarker2Tf (const aruco::Marker &marker, bool rotate_marker_axis=true) |
| aruco::CameraParameters | aruco_ros::rosCameraInfo2ArucoCamParams (const sensor_msgs::CameraInfo &cam_info, bool useRectifiedParameters) |
| rosCameraInfo2ArucoCamParams gets the camera intrinsics from a CameraInfo message and copies them to aruco_ros own data structure More... | |