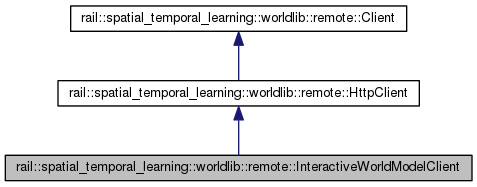
The main HTTP client connection to the interactive world trained models. More...
#include <InteractiveWorldModelClient.h>
Public Member Functions | |
| bool | getTaskItems (const uint32_t task_id, std::vector< world::Item > &items) const |
| Load the list of items for a given task from the remote server. | |
| bool | getTaskModel (const uint32_t task_id, model::TaskModel &task_model) const |
| Load a task model from the remote server. | |
| bool | getTaskSurfaces (const uint32_t task_id, std::vector< world::Surface > &surfaces) const |
| Load the list of surfaces for a given task from the remote server. | |
| InteractiveWorldModelClient (const InteractiveWorldModelClient &client) | |
| Create a new InteractiveWorldModelClient. | |
| InteractiveWorldModelClient (const std::string &host="robotsfor.me", const uint16_t port=HttpClient::DEFAULT_PORT) | |
| Create a new InteractiveWorldModelClient. | |
Static Public Attributes | |
| static const uint32_t | TASK_ID_DIRTY_DISHES = 3 |
| static const uint32_t | TASK_ID_MAGAZINE_PLACEMENT = 2 |
| static const uint32_t | TASK_ID_PUT_AWAY_GENERAL = 4 |
| static const uint32_t | TASK_ID_TABLE_SETTING = 1 |
Detailed Description
The main HTTP client connection to the interactive world trained models.
The interactive world model client performs HTTP requests to the trained models from the interactive world.
Definition at line 34 of file InteractiveWorldModelClient.h.
Constructor & Destructor Documentation
| InteractiveWorldModelClient::InteractiveWorldModelClient | ( | const InteractiveWorldModelClient & | client | ) |
Create a new InteractiveWorldModelClient.
Creates a new InteractiveWorldModelClient by copying the values from the given InteractiveWorldModelClient.
- Parameters:
-
client The InteractiveWorldModelClient to copy.
Definition at line 28 of file InteractiveWorldModelClient.cpp.
| rail::spatial_temporal_learning::worldlib::remote::InteractiveWorldModelClient::InteractiveWorldModelClient | ( | const std::string & | host = "robotsfor.me", |
| const uint16_t | port = HttpClient::DEFAULT_PORT |
||
| ) |
Create a new InteractiveWorldModelClient.
Creates a new InteractiveWorldModelClient with the given connection information.
- Parameters:
-
host The host of the server (defaults to robotsfor.me). port The host port of the database (defaults to 80).
Member Function Documentation
| bool InteractiveWorldModelClient::getTaskItems | ( | const uint32_t | task_id, |
| std::vector< world::Item > & | items | ||
| ) | const |
Load the list of items for a given task from the remote server.
Attempts to load the list of items for a given task from the interactive world server with the given task ID and store the information in the given vector.
- Parameters:
-
task_id The task ID to load the item list for. items The vector to fill with the unique items.
- Returns:
- True if no errors occurred while loading the model.
Definition at line 117 of file InteractiveWorldModelClient.cpp.
| bool InteractiveWorldModelClient::getTaskModel | ( | const uint32_t | task_id, |
| model::TaskModel & | task_model | ||
| ) | const |
Load a task model from the remote server.
Attempts to load a task model from the interactive world server with the given task ID and place the information in the given task model.
- Parameters:
-
task_id The task ID to load. task_model The TaskModel to fill.
- Returns:
- True if no errors occurred while loading the model.
Definition at line 37 of file InteractiveWorldModelClient.cpp.
| bool InteractiveWorldModelClient::getTaskSurfaces | ( | const uint32_t | task_id, |
| std::vector< world::Surface > & | surfaces | ||
| ) | const |
Load the list of surfaces for a given task from the remote server.
Attempts to load the list of surfaces for a given task from the interactive world server with the given task ID and store the information in the given vector.
- Parameters:
-
task_id The task ID to load the surface list for. surfaces The vector to fill with the unique surfaces.
- Returns:
- True if no errors occurred while loading the model.
Definition at line 131 of file InteractiveWorldModelClient.cpp.
Member Data Documentation
const uint32_t rail::spatial_temporal_learning::worldlib::remote::InteractiveWorldModelClient::TASK_ID_DIRTY_DISHES = 3 [static] |
The task model ID for the dirty dishes task on the RobotsFor.Me server.
Definition at line 42 of file InteractiveWorldModelClient.h.
const uint32_t rail::spatial_temporal_learning::worldlib::remote::InteractiveWorldModelClient::TASK_ID_MAGAZINE_PLACEMENT = 2 [static] |
The task model ID for the magazine task on the RobotsFor.Me server.
Definition at line 40 of file InteractiveWorldModelClient.h.
const uint32_t rail::spatial_temporal_learning::worldlib::remote::InteractiveWorldModelClient::TASK_ID_PUT_AWAY_GENERAL = 4 [static] |
The task model ID for the general put away task on the RobotsFor.Me server.
Definition at line 44 of file InteractiveWorldModelClient.h.
const uint32_t rail::spatial_temporal_learning::worldlib::remote::InteractiveWorldModelClient::TASK_ID_TABLE_SETTING = 1 [static] |
The task model ID for the table setting task on the RobotsFor.Me server.
Definition at line 38 of file InteractiveWorldModelClient.h.
The documentation for this class was generated from the following files: