#include <ros/ros.h>#include <vigir_pluginlib/plugin.h>#include <vigir_footstep_planning_plugins/plugins/step_plan_msg_plugin.h>#include <vigir_step_control/step_queue.h>
Include dependency graph for step_controller_plugin.h:

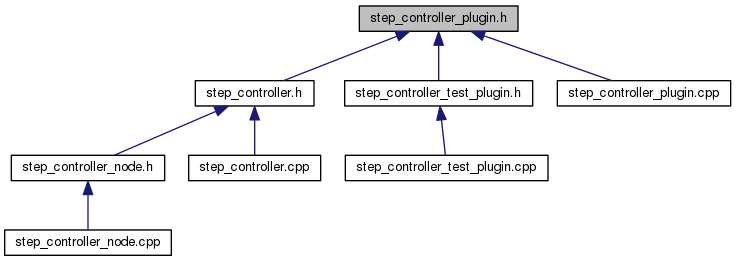
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | vigir_step_control::StepControllerPlugin |
Namespaces | |
| namespace | vigir_step_control |
Enumerations | |
| enum | vigir_step_control::StepControllerState { vigir_step_control::NOT_READY = msgs::ExecuteStepPlanFeedback::NOT_READY, vigir_step_control::READY = msgs::ExecuteStepPlanFeedback::READY, vigir_step_control::ACTIVE = msgs::ExecuteStepPlanFeedback::ACTIVE, vigir_step_control::PAUSED = msgs::ExecuteStepPlanFeedback::PAUSED, vigir_step_control::FINISHED = msgs::ExecuteStepPlanFeedback::FINISHED, vigir_step_control::FAILED = msgs::ExecuteStepPlanFeedback::FAILED } |
Functions | |
| std::string | vigir_step_control::toString (const StepControllerState &state) |