#include <ros/ros.h>#include <geometry_msgs/Vector3.h>#include <vigir_footstep_planning_msgs/EditStep.h>#include <vigir_footstep_planning_msgs/ErrorStatus.h>#include <vigir_footstep_planning_msgs/Feet.h>#include <vigir_footstep_planning_msgs/FeetPoseRequest.h>#include <vigir_footstep_planning_msgs/FootstepExecutionStatus.h>#include <vigir_footstep_planning_msgs/Foot.h>#include <vigir_footstep_planning_msgs/PatternParameters.h>#include <vigir_footstep_planning_msgs/PatternGeneratorParameters.h>#include <vigir_footstep_planning_msgs/PlanningFeedback.h>#include <vigir_footstep_planning_msgs/StepPlanFeedback.h>#include <vigir_footstep_planning_msgs/StepPlanRequest.h>#include <vigir_footstep_planning_msgs/StepPlan.h>#include <vigir_footstep_planning_msgs/Step.h>#include <vigir_footstep_planning_msgs/UpdateMode.h>#include <vigir_footstep_planning_msgs/EditStepService.h>#include <vigir_footstep_planning_msgs/GenerateFeetPoseService.h>#include <vigir_footstep_planning_msgs/GeneratePatternService.h>#include <vigir_footstep_planning_msgs/GetStepPlanService.h>#include <vigir_footstep_planning_msgs/PatternGeneratorParametersService.h>#include <vigir_footstep_planning_msgs/SetStepPlanService.h>#include <vigir_footstep_planning_msgs/StepPlanRequestService.h>#include <vigir_footstep_planning_msgs/StitchStepPlanService.h>#include <vigir_footstep_planning_msgs/TransformFeetPosesService.h>#include <vigir_footstep_planning_msgs/TransformFootPoseService.h>#include <vigir_footstep_planning_msgs/TransformStepPlanService.h>#include <vigir_footstep_planning_msgs/UpdateFeetService.h>#include <vigir_footstep_planning_msgs/UpdateFootService.h>#include <vigir_footstep_planning_msgs/UpdateStepPlanService.h>#include <vigir_footstep_planning_msgs/EditStepAction.h>#include <vigir_footstep_planning_msgs/ExecuteStepPlanAction.h>#include <vigir_footstep_planning_msgs/GenerateFeetPoseAction.h>#include <vigir_footstep_planning_msgs/GeneratePatternAction.h>#include <vigir_footstep_planning_msgs/GetStepPlanAction.h>#include <vigir_footstep_planning_msgs/SetStepPlanAction.h>#include <vigir_footstep_planning_msgs/StepPlanRequestAction.h>#include <vigir_footstep_planning_msgs/StitchStepPlanAction.h>#include <vigir_footstep_planning_msgs/UpdateFeetAction.h>#include <vigir_footstep_planning_msgs/UpdateFootAction.h>#include <vigir_footstep_planning_msgs/UpdateStepPlanAction.h>
Include dependency graph for footstep_planning_msgs.h:

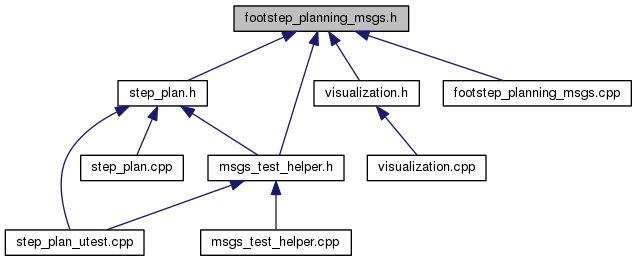
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | vigir_footstep_planning |
| namespace | vigir_footstep_planning::msgs |
Functions | |
| template<typename Tin , typename Tout > | |
| void | vigir_footstep_planning::copyPosition (const Tin &p_in, Tout &p_out) |
| msgs::ErrorStatus | vigir_footstep_planning::createErrorStatus (const std::string &context, unsigned int error, const std::string &error_msg, unsigned int warning, const std::string &warning_msg, bool output=true, double throttle_rate=0.0) |
| std::string | vigir_footstep_planning::ErrorStatusCodeToString (unsigned int error) |
| msgs::ErrorStatus | vigir_footstep_planning::ErrorStatusError (unsigned int error, const std::string &context, const std::string &error_msg, bool output=true, double throttle_rate=0.0) |
| msgs::ErrorStatus | vigir_footstep_planning::ErrorStatusWarning (unsigned int warning, const std::string &context, const std::string &warning_msg, bool output=true, double throttle_rate=0.0) |
| bool | vigir_footstep_planning::hasError (const msgs::ErrorStatus &status) |
| bool | vigir_footstep_planning::hasWarning (const msgs::ErrorStatus &status) |
| msgs::ErrorStatus | vigir_footstep_planning::isConsistent (const msgs::StepPlan &result) |
| bool | vigir_footstep_planning::isOk (const msgs::ErrorStatus &status) |
| msgs::ErrorStatus | vigir_footstep_planning::operator+ (const msgs::ErrorStatus &lhs, const msgs::ErrorStatus &rhs) |
| msgs::ErrorStatus | vigir_footstep_planning::operator+= (msgs::ErrorStatus &lhs, const msgs::ErrorStatus &rhs) |
| std::string | vigir_footstep_planning::toString (const msgs::ErrorStatus &error_status) |
| std::string | vigir_footstep_planning::toString (const msgs::FootstepExecutionStatus &execution_status) |
| std::string | vigir_footstep_planning::WarningStatusCodeToString (unsigned int warning) |