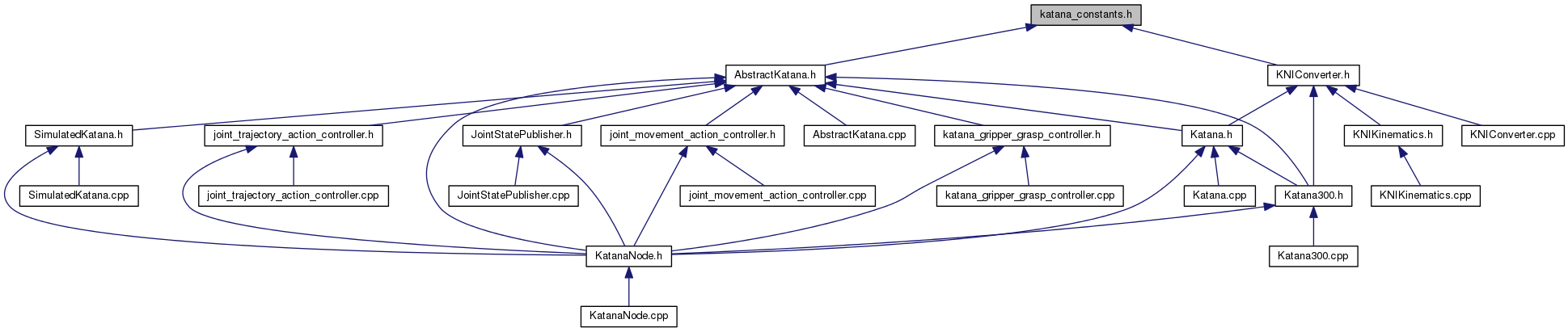
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | katana |
Variables | |
| static const double | katana::GRIPPER_CLOSED_ANGLE = -0.44 |
| Constants for gripper fully open or fully closed (should be equal to the value in the urdf description) | |
| const size_t | katana::GRIPPER_INDEX = NUM_MOTORS - 1 |
| The motor index of the gripper (used in all vectors -- e.g., motor_angles_) | |
| static const double | katana::GRIPPER_OPEN_ANGLE = 0.30 |
| Constants for gripper fully open or fully closed (should be equal to the value in the urdf description) | |
| static const double | katana::GRIPPER_OPENING_CLOSING_DURATION = 3.0 |
| The maximum time it takes to open or close the gripper. | |
| static const double | katana::KNI_GRIPPER_CLOSED_ANGLE = 0.21652991032554647 |
| constants for converting between the KNI gripper angle and the URDF gripper angle | |
| static const double | katana::KNI_GRIPPER_OPEN_ANGLE = -2.057443 |
| static const int | katana::KNI_MAX_ACCELERATION = 2 |
| acceleration limit = 1 or 2 [enc / (10 ms)^2] | |
| static const int | katana::KNI_MAX_VELOCITY = 180 |
| velocity limit <= 180 [enc / 10 ms] | |
| static const double | katana::KNI_TO_ROS_LENGTH = 0.001 |
| the conversion factor from KNI coordinates (in mm) to ROS coordinates (in m) | |
| static const double | katana::KNI_TO_ROS_TIME = 100.0 |
| KNI time is in 10 milliseconds (most of the time), ROS time is in seconds. | |
| static const double | katana::KNI_TO_URDF_GRIPPER_FACTOR |
| static const size_t | katana::MOVE_BUFFER_SIZE = 16 |
| const size_t | katana::NUM_GRIPPER_JOINTS = 2 |
| The number of gripper_joints in the katana (= the two gripper finger joints) | |
| const size_t | katana::NUM_JOINTS = NUM_MOTORS - 1 |
| The number of joints in the katana (= only the 5 "real" joints) | |
| const size_t | katana::NUM_MOTORS = 6 |
| The number of motors in the katana (= all 5 "real" joints + the gripper) | |