Trained grasp model information. More...
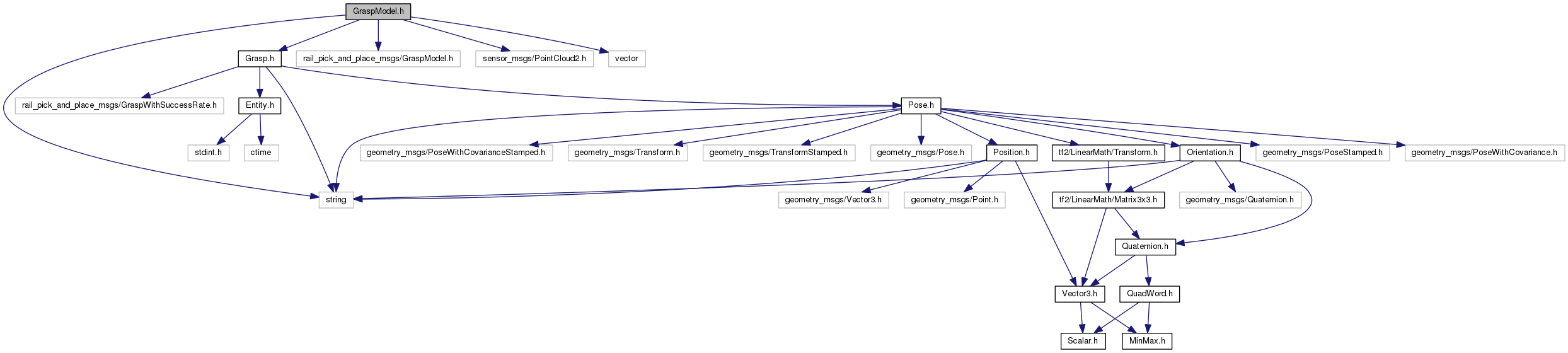
#include "Grasp.h"#include <rail_pick_and_place_msgs/GraspModel.h>#include <sensor_msgs/PointCloud2.h>#include <string>#include <vector>
Include dependency graph for GraspModel.h:
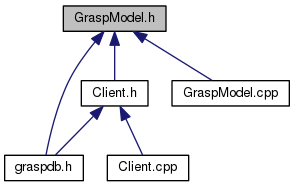
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rail::pick_and_place::graspdb::GraspModel |
| Trained grasp model information. More... | |
Namespaces | |
| namespace | rail |
| namespace | rail::pick_and_place |
| namespace | rail::pick_and_place::graspdb |
Detailed Description
Trained grasp model information.
A grasp model contains a 3D point cloud model made up of several segmented point cloud segments from various grasp demonstrations, an object name (may be non-unique), an array of grasps for the model, and a unique identifier. This class is useful for internal data management within the graspdb library. Convenience functions are added for use with ROS messages.
- Date:
- March 12, 2015
Definition in file GraspModel.h.