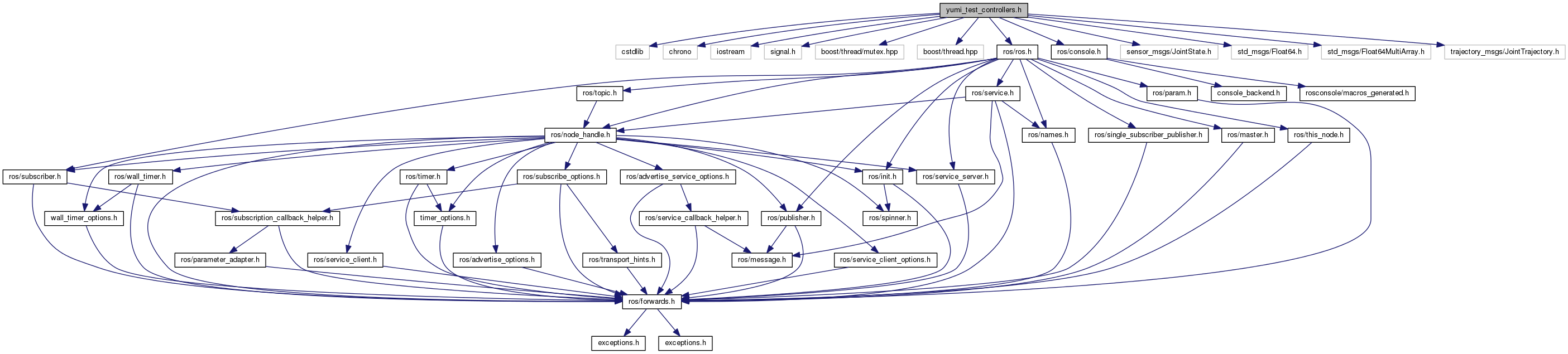
#include <cstdlib>#include <chrono>#include <iostream>#include <signal.h>#include <boost/thread/mutex.hpp>#include <boost/thread.hpp>#include <ros/ros.h>#include <ros/console.h>#include <sensor_msgs/JointState.h>#include <std_msgs/Float64.h>#include <std_msgs/Float64MultiArray.h>#include <trajectory_msgs/JointTrajectory.h>
Include dependency graph for yumi_test_controllers.h:
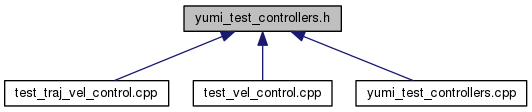
This graph shows which files directly or indirectly include this file: