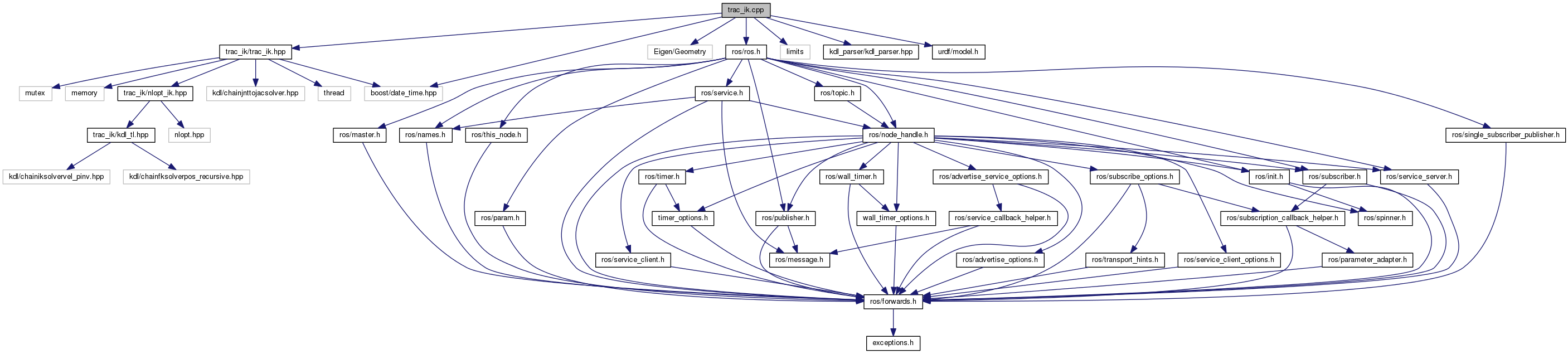
#include <trac_ik/trac_ik.hpp>#include <boost/date_time.hpp>#include <Eigen/Geometry>#include <ros/ros.h>#include <limits>#include <kdl_parser/kdl_parser.hpp>#include <urdf/model.h>
Include dependency graph for trac_ik.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | TRAC_IK |
Functions | |
| void | TRAC_IK::normalizeAngle (double &val, const double &min, const double &max) |
| void | TRAC_IK::normalizeAngle (double &val, const double &target) |