#include <vcg/math/quaternion.h>#include <vcg/math/matrix44.h>#include <eigenlib/Eigen/Dense>#include <eigenlib/Eigen/Eigenvalues>#include <iostream>
Include dependency graph for point_matching.h:
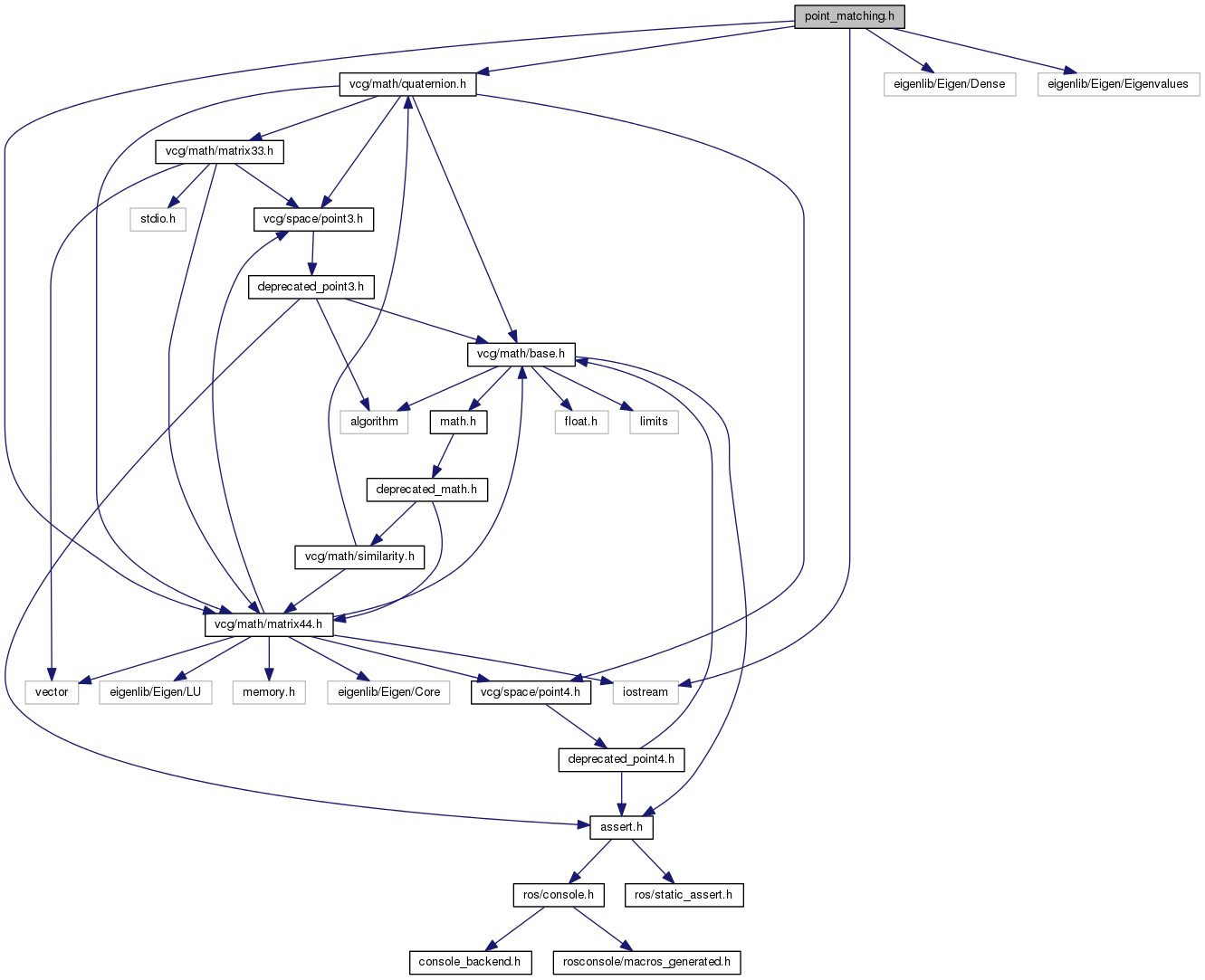
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | vcg |
* | |
Functions | |
| template<class S > | |
| void | vcg::ComputeCrossCovarianceMatrix (const std::vector< Point3< S > > &spVec, Point3< S > &spBarycenter, const std::vector< Point3< S > > &tpVec, Point3< S > &tpBarycenter, Eigen::Matrix3d &m) |
| Compute cross covariance. | |
| template<class S > | |
| void | vcg::ComputeRigidMatchMatrix (std::vector< Point3< S > > &Pfix, std::vector< Point3< S > > &Pmov, Quaternion< S > &q, Point3< S > &tr) |
| Compute the roto-translation that applied to PMov bring them onto Pfix Rotation is computed as a quaternion. | |
| template<class S > | |
| void | vcg::ComputeRigidMatchMatrix (std::vector< Point3< S > > &Pfix, std::vector< Point3< S > > &Pmov, Matrix44< S > &res) |
| Compute the roto-translation that applied to PMov bring them onto Pfix Rotation is computed as a quaternion. | |
| template<class S > | |
| void | vcg::ComputeSimilarityMatchMatrix (std::vector< Point3< S > > &Pfix, std::vector< Point3< S > > &Pmov, Matrix44< S > &res) |