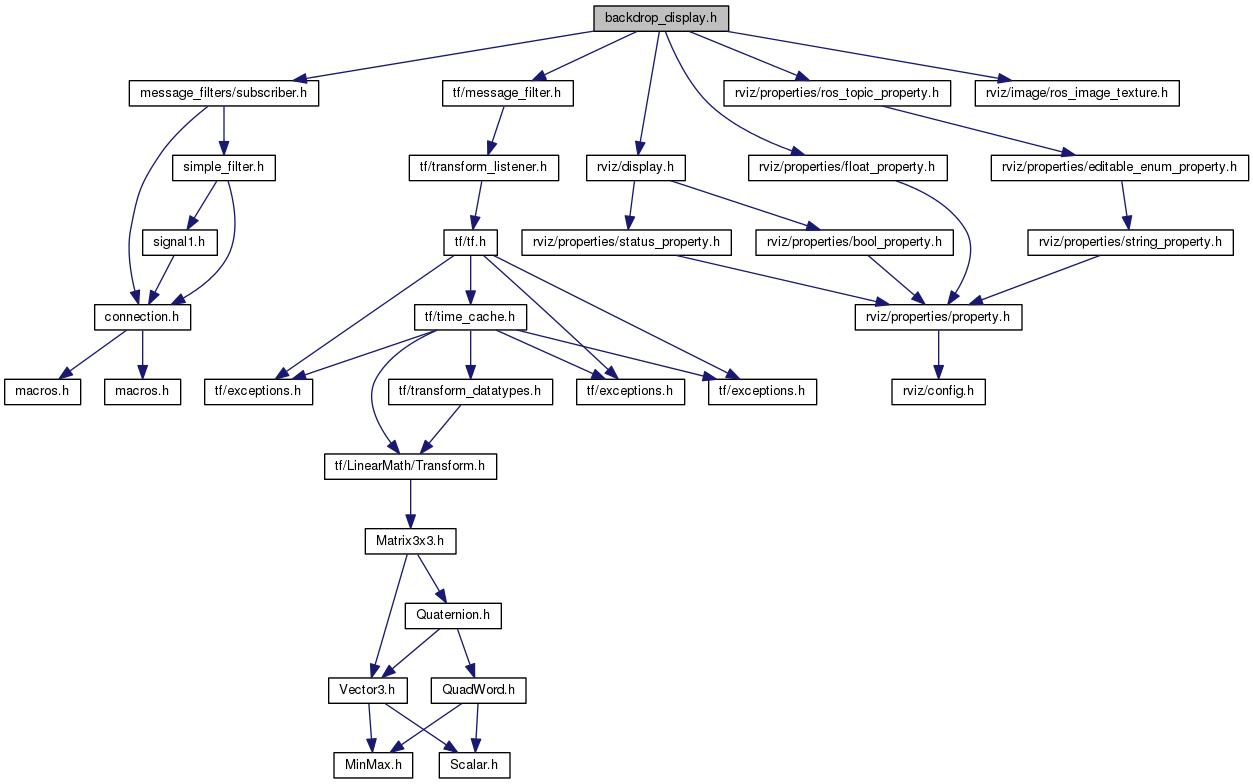
#include <message_filters/subscriber.h>#include <tf/message_filter.h>#include <rviz/display.h>#include <rviz/image/ros_image_texture.h>#include <rviz/properties/float_property.h>#include <rviz/properties/ros_topic_property.h>
Include dependency graph for backdrop_display.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rviz_backdrop::BackdropDisplay |
| Display an image *in* the 3D scene, at the pose of the frame published in the sensor_msgs/Image. More... | |
Namespaces | |
| namespace | Ogre |
| namespace | rviz_backdrop |