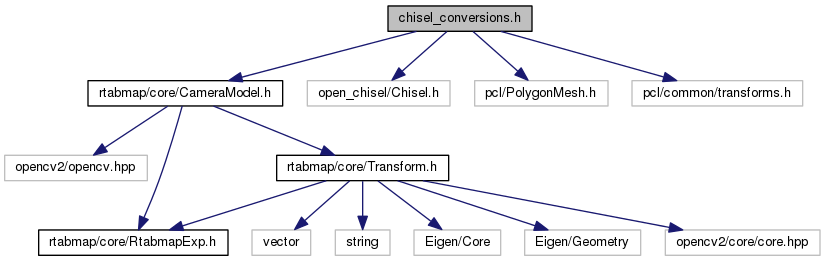
#include <rtabmap/core/CameraModel.h>#include <open_chisel/Chisel.h>#include <pcl/PolygonMesh.h>#include <pcl/common/transforms.h>
Include dependency graph for chisel_conversions.h:
Go to the source code of this file.
Namespaces | |
| namespace | rtabmap |
Functions | |
| chisel::PinholeCamera | rtabmap::cameraModelToChiselCamera (const CameraModel &camera) |
| pcl::PolygonMesh::Ptr | rtabmap::chiselToPolygonMesh (const chisel::MeshMap &meshMap, unsigned char r=100, unsigned char g=100, unsigned char b=100) |
| std::shared_ptr < chisel::ColorImage< unsigned char > > | rtabmap::colorImageToChisel (const cv::Mat &image) |
| std::shared_ptr < chisel::DepthImage< float > > | rtabmap::depthImageToChisel (const cv::Mat &image) |
| template<typename PointRGBT > | |
| chisel::PointCloudPtr | rtabmap::pointCloudRGBToChisel (const typename pcl::PointCloud< PointRGBT > &cloud, const Transform &transform=Transform::getIdentity()) |
| template<typename PointT > | |
| chisel::PointCloudPtr | rtabmap::pointCloudToChisel (const typename pcl::PointCloud< PointT > &cloud, const Transform &transform=Transform::getIdentity()) |