Bumper/cliff to pointcloud nodelet class declaration. More...
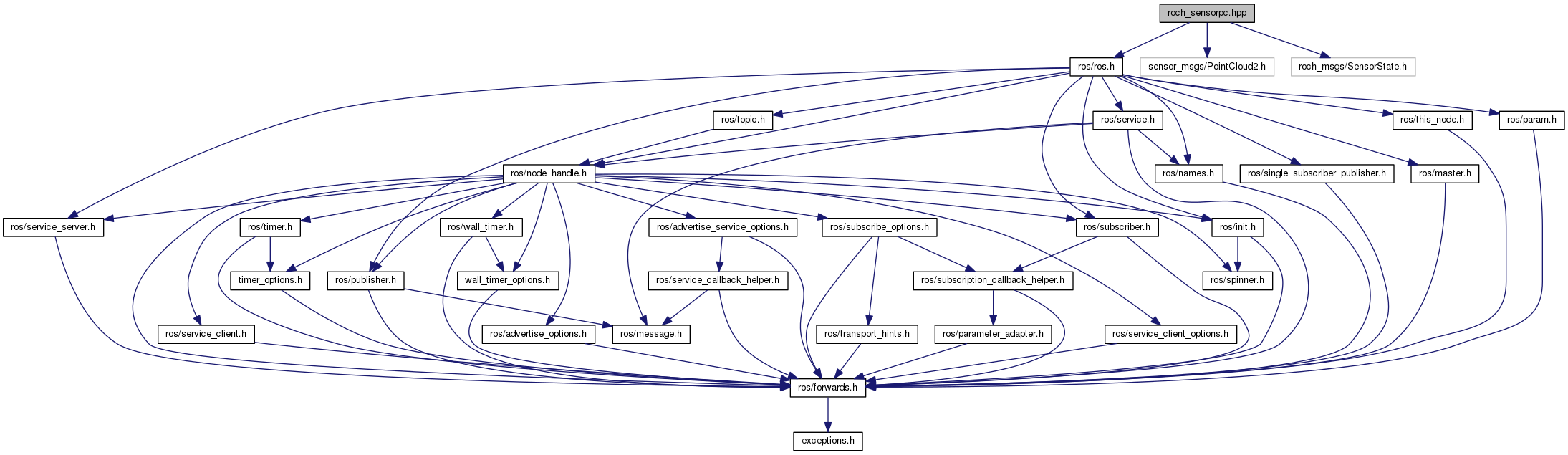
Include dependency graph for roch_sensorpc.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | roch_sensorpc::SensorPcNodelet |
| SensorPcNodelet class declaration. More... | |
Namespaces | |
| namespace | roch_sensorpc |
Detailed Description
Bumper/cliff to pointcloud nodelet class declaration.
Publish bumpers and cliff sensors events as points in a pointcloud, so navistack can use them for poor-man navigation. Implemented as a nodelet intended to run together with kobuki_node.
Definition in file roch_sensorpc.hpp.