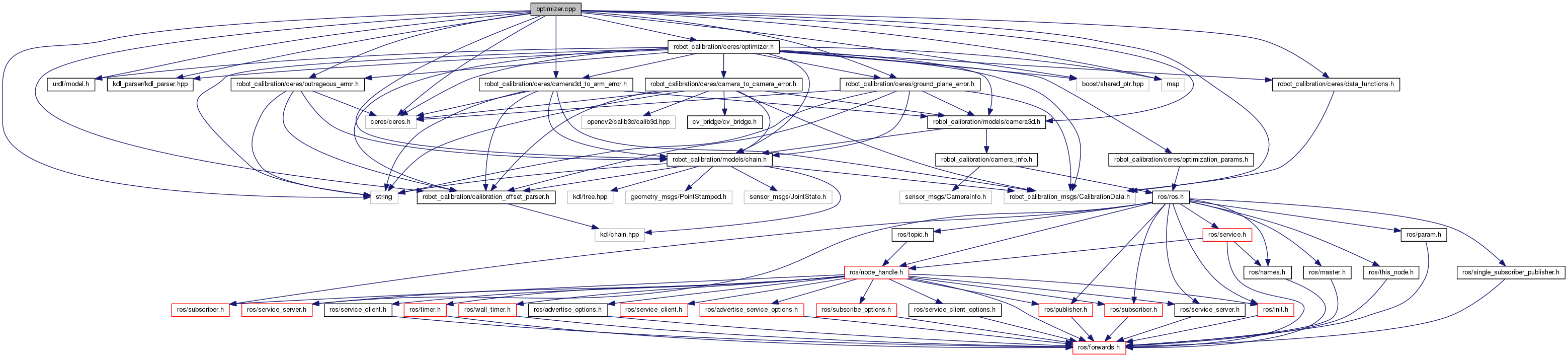
#include <robot_calibration/ceres/optimizer.h>#include <ceres/ceres.h>#include <urdf/model.h>#include <kdl_parser/kdl_parser.hpp>#include <robot_calibration_msgs/CalibrationData.h>#include <robot_calibration/calibration_offset_parser.h>#include <robot_calibration/ceres/camera3d_to_arm_error.h>#include <robot_calibration/ceres/ground_plane_error.h>#include <robot_calibration/ceres/data_functions.h>#include <robot_calibration/ceres/outrageous_error.h>#include <robot_calibration/models/camera3d.h>#include <robot_calibration/models/chain.h>#include <boost/shared_ptr.hpp>#include <string>#include <map>
Include dependency graph for optimizer.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | robot_calibration |
Calibration code lives under this namespace. | |
Functions | |
| bool | robot_calibration::hasSensor (const robot_calibration_msgs::CalibrationData &msg, const std::string &sensor) |