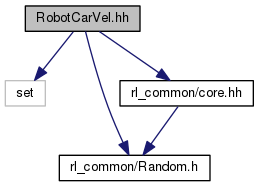
Include dependency graph for RobotCarVel.hh:
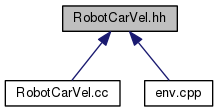
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RobotCarVel |
Detailed Description
This domain is a simulation of velocity control for the Austin Robot Technology autonomous vehicle. This vehicle is described in: Beeson et al, "Multiagent Interactions in Urban Driving," Journal of Physical Agents, March 2008. The velocity control task is described in: Hester, Quinlan, and Stone, "A Real-Time Model-Based Reinforcement Learning Architecture for Robot Control", arXiv 1105.1749, 2011.
Definition in file RobotCarVel.hh.