Public Member Functions | |
| void | connectedCallback (boolean b) |
| boolean | create () |
| void | delete () |
| delete this item | |
| String[] | getAlgorithms () |
| String[] | getMobilityNames () |
| String[] | getOptimizerNames () |
| double[][] | getPath () |
| PathPlanner | getPlanner () |
| RoadmapNode[] | getRoadmap () |
| GrxPathPlanningAlgorithmItem (String name, GrxPluginManager manager) | |
| void | optimize () |
| 経路を最適化する | |
| boolean | propertyChanged (String key, String value) |
| check validity of new value of property and update if valid | |
| void | propertyUpdate () |
| 移動動作設計コンポーネントから現在選択している経路計画アルゴリズムに対するプロパティを取得し、選択しているアイテムに設定する | |
| void | setEndPoint () |
| void | setStartPoint () |
| void | startCalc () |
Static Public Attributes | |
| static final String | FILE_EXTENSION = "ppa" |
| static final String | TITLE = "PPAlgorithm" |
Package Functions | |
| DynamicsSimulator | getDynamicsSimulator () |
| Double | getZPosition () |
| get z position of the robot | |
Private Member Functions | |
| PathConsumerComp | _pathConsumer () |
| boolean | _setGoalPosition () |
| set goal position of planning to planner | |
| boolean | _setStartPosition () |
| set start position of planning to planner | |
| void | calc () |
| void | displayPath () |
| void | execPathPlannerConsumer () |
| 経路計画コンポーネントのコンシューマを立ち上げ | |
| String[][] | getAlgoProperty () |
| String | getConfigFilePath () |
| String | getRobotBaseLink (String name) |
| String | getRobotBaseLink (GrxModelItem model) |
| boolean | initPathPlanner () |
Private Attributes | |
| boolean | calcSucceed = false |
| boolean | connectChange_ = false |
| PathPlanner | planner_ = null |
Static Private Attributes | |
| static PathConsumerComp | ppcomp_ = null |
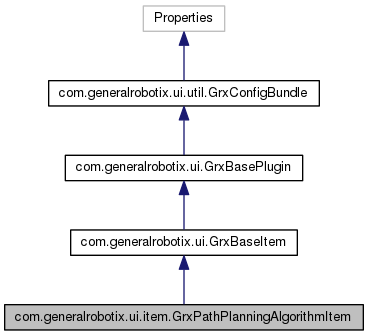
Detailed Description
Definition at line 48 of file GrxPathPlanningAlgorithmItem.java.
Constructor & Destructor Documentation
| com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.GrxPathPlanningAlgorithmItem | ( | String | name, |
| GrxPluginManager | manager | ||
| ) | [inline] |
Definition at line 58 of file GrxPathPlanningAlgorithmItem.java.
Member Function Documentation
| PathConsumerComp com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem._pathConsumer | ( | ) | [inline, private] |
Definition at line 114 of file GrxPathPlanningAlgorithmItem.java.
| boolean com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem._setGoalPosition | ( | ) | [inline, private] |
set goal position of planning to planner
- Returns:
- true if set successfully, false otherwise
Definition at line 355 of file GrxPathPlanningAlgorithmItem.java.
| boolean com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem._setStartPosition | ( | ) | [inline, private] |
set start position of planning to planner
- Returns:
- true if set successfully, false otherwise
Definition at line 332 of file GrxPathPlanningAlgorithmItem.java.
| void com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.calc | ( | ) | [inline, private] |
Definition at line 430 of file GrxPathPlanningAlgorithmItem.java.
| void com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.connectedCallback | ( | boolean | b | ) | [inline] |
Definition at line 597 of file GrxPathPlanningAlgorithmItem.java.
- Returns:
Reimplemented from com.generalrobotix.ui.GrxBaseItem.
Definition at line 87 of file GrxPathPlanningAlgorithmItem.java.
delete this item
Reimplemented from com.generalrobotix.ui.GrxBaseItem.
Definition at line 92 of file GrxPathPlanningAlgorithmItem.java.
| void com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.displayPath | ( | ) | [inline, private] |
Definition at line 493 of file GrxPathPlanningAlgorithmItem.java.
| void com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.execPathPlannerConsumer | ( | ) | [inline, private] |
経路計画コンポーネントのコンシューマを立ち上げ
Definition at line 124 of file GrxPathPlanningAlgorithmItem.java.
| String [][] com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getAlgoProperty | ( | ) | [inline, private] |
Definition at line 278 of file GrxPathPlanningAlgorithmItem.java.
| String [] com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getAlgorithms | ( | ) | [inline] |
Definition at line 556 of file GrxPathPlanningAlgorithmItem.java.
| String com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getConfigFilePath | ( | ) | [inline, private] |
| DynamicsSimulator com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getDynamicsSimulator | ( | ) | [inline, package] |
Definition at line 542 of file GrxPathPlanningAlgorithmItem.java.
| String [] com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getMobilityNames | ( | ) | [inline] |
Definition at line 565 of file GrxPathPlanningAlgorithmItem.java.
| String [] com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getOptimizerNames | ( | ) | [inline] |
Definition at line 573 of file GrxPathPlanningAlgorithmItem.java.
| double [][] com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getPath | ( | ) | [inline] |
Definition at line 589 of file GrxPathPlanningAlgorithmItem.java.
| PathPlanner com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getPlanner | ( | ) | [inline] |
Definition at line 110 of file GrxPathPlanningAlgorithmItem.java.
| RoadmapNode [] com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getRoadmap | ( | ) | [inline] |
Definition at line 581 of file GrxPathPlanningAlgorithmItem.java.
| String com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getRobotBaseLink | ( | String | name | ) | [inline, private] |
Definition at line 319 of file GrxPathPlanningAlgorithmItem.java.
| String com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getRobotBaseLink | ( | GrxModelItem | model | ) | [inline, private] |
Definition at line 324 of file GrxPathPlanningAlgorithmItem.java.
| Double com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.getZPosition | ( | ) | [inline, package] |
get z position of the robot
- Returns:
- z position
Definition at line 308 of file GrxPathPlanningAlgorithmItem.java.
| boolean com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.initPathPlanner | ( | ) | [inline, private] |
経路を最適化する
Definition at line 476 of file GrxPathPlanningAlgorithmItem.java.
| boolean com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.propertyChanged | ( | String | property, |
| String | value | ||
| ) | [inline] |
check validity of new value of property and update if valid
- Parameters:
-
property name of property value value of property
- Returns:
- true if checked(even if value is not used), false otherwise
Reimplemented from com.generalrobotix.ui.GrxBasePlugin.
Definition at line 100 of file GrxPathPlanningAlgorithmItem.java.
移動動作設計コンポーネントから現在選択している経路計画アルゴリズムに対するプロパティを取得し、選択しているアイテムに設定する
Definition at line 176 of file GrxPathPlanningAlgorithmItem.java.
Definition at line 392 of file GrxPathPlanningAlgorithmItem.java.
Definition at line 373 of file GrxPathPlanningAlgorithmItem.java.
Definition at line 409 of file GrxPathPlanningAlgorithmItem.java.
Member Data Documentation
boolean com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.calcSucceed = false [private] |
Definition at line 429 of file GrxPathPlanningAlgorithmItem.java.
Definition at line 56 of file GrxPathPlanningAlgorithmItem.java.
final String com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.FILE_EXTENSION = "ppa" [static] |
Definition at line 51 of file GrxPathPlanningAlgorithmItem.java.
PathPlanner com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.planner_ = null [private] |
Definition at line 54 of file GrxPathPlanningAlgorithmItem.java.
PathConsumerComp com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.ppcomp_ = null [static, private] |
Definition at line 55 of file GrxPathPlanningAlgorithmItem.java.
final String com.generalrobotix.ui.item.GrxPathPlanningAlgorithmItem.TITLE = "PPAlgorithm" [static] |
Definition at line 50 of file GrxPathPlanningAlgorithmItem.java.
The documentation for this class was generated from the following file: