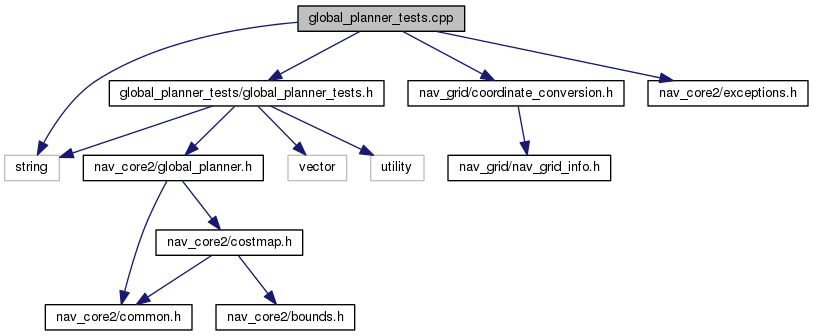
#include <global_planner_tests/global_planner_tests.h>#include <nav_grid/coordinate_conversion.h>#include <nav_core2/exceptions.h>#include <string>
Include dependency graph for global_planner_tests.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | global_planner_tests |
Functions | |
| bool | global_planner_tests::checkOccupiedPathCoverage (nav_core2::GlobalPlanner &planner, const PoseList &start_cells, const PoseList &goal_cells, const std::string &test_name, bool check_exception_type=true, bool verbose=false, bool quit_early=true, bool invalid_starts=true) |
| Check if the appropriate exception is thrown when attempting to plan to or from an occupied cell. | |
| bool | global_planner_tests::checkOutOfBoundsPathCoverage (nav_core2::GlobalPlanner &planner, const PoseList &start_cells, const PoseList &goal_cells, const std::string &test_name, bool check_exception_type=true, bool verbose=false, bool quit_early=true, bool invalid_starts=true) |
| Check if the appropriate exception is thrown when attempting to plan to or from a pose off the costmap. | |
| bool | global_planner_tests::checkValidPathCoverage (nav_core2::GlobalPlanner &planner, const PoseList &free_cells, bool verbose=false, bool quit_early=true) |
| Check if a path exists between every pair of free_cells. | |
| PoseList | global_planner_tests::createPosesOutsideCostmap (const nav_core2::Costmap &costmap) |
| Create a list of poses that are outside the costmap's bounds. | |
| void | global_planner_tests::groupCells (const nav_core2::Costmap &costmap, PoseList &free_cells, PoseList &occupied_cells, bool include_edges=true) |
| Populate two lists of poses from a costmap. one with all the free cells, the other with all the occupied cells. | |
| bool | global_planner_tests::hasCompleteCoverage (nav_core2::GlobalPlanner &planner, const nav_core2::Costmap &costmap, int max_failure_cases=10, bool check_exception_type=true, bool verbose=false, bool quit_early=true) |
| Run a bunch of tests, assuming there is a valid path from any free cell to any other free cell. | |
| bool | global_planner_tests::hasNoPaths (nav_core2::GlobalPlanner &planner, const nav_core2::Costmap &costmap, bool check_exception_type=true, bool verbose=false, bool quit_early=true) |
| Run a bunch of tests, assuming there are no valid paths from any free cell to any other free cell. | |
| bool | global_planner_tests::planExists (nav_core2::GlobalPlanner &planner, nav_2d_msgs::Pose2DStamped start, nav_2d_msgs::Pose2DStamped goal) |
| Simple check to see if a plan exists. Returns a boolean instead of returning path or throwing an exception. | |
| PoseList | global_planner_tests::subsetPoseList (const PoseList &cells, unsigned int num_cells) |
| Create a new list of poses from cells that is num_cells long. | |