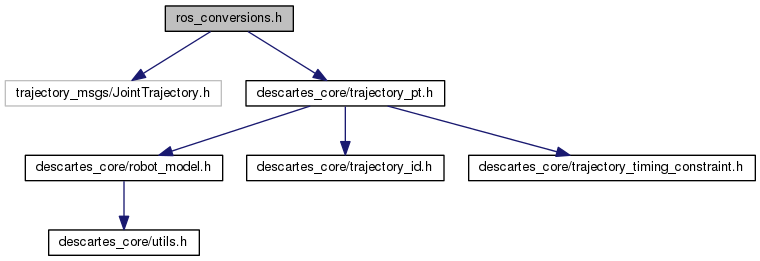
Include dependency graph for ros_conversions.h:
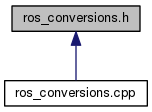
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | descartes_utilities |
Functions | |
| bool | descartes_utilities::toRosJointPoints (const descartes_core::RobotModel &model, const std::vector< descartes_core::TrajectoryPtPtr > &joint_traj, double default_joint_vel, std::vector< trajectory_msgs::JointTrajectoryPoint > &out) |
| Converts a sequence of Descartes joint trajectory points to ROS trajectory points. Copies timing if specified, and sets vel/acc/effort fields to zeros. | |