#include <ros/ros.h>#include <ros/callback_queue.h>#include <boost/thread.hpp>#include <costmap_2d/costmap_2d.h>#include <costmap_2d/costmap_2d_ros.h>#include <geometry_msgs/Polygon.h>#include <costmap_converter/ObstacleArrayMsg.h>
Include dependency graph for costmap_converter_interface.h:

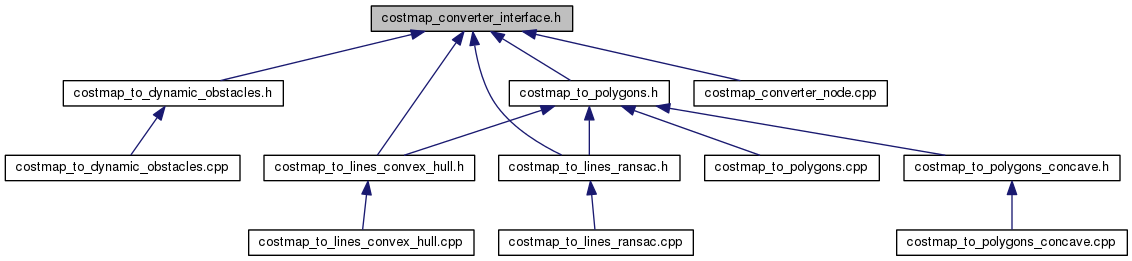
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | costmap_converter::BaseCostmapToDynamicObstacles |
| class | costmap_converter::BaseCostmapToPolygons |
| This abstract class defines the interface for plugins that convert the costmap into polygon types. More... | |
Namespaces | |
| namespace | costmap_converter |
Typedefs | |
| typedef boost::shared_ptr < const ObstacleArrayMsg > | costmap_converter::ObstacleArrayConstPtr |
| Typedef for a shared dynamic obstacle container (read-only access) | |
| typedef boost::shared_ptr < ObstacleArrayMsg > | costmap_converter::ObstacleArrayPtr |
| Typedef for a shared dynamic obstacle container. | |
| typedef boost::shared_ptr < const std::vector < geometry_msgs::Polygon > > | costmap_converter::PolygonContainerConstPtr |
| Typedef for a shared polygon container (read-only access) | |
| typedef boost::shared_ptr < std::vector < geometry_msgs::Polygon > > | costmap_converter::PolygonContainerPtr |
| Typedef for a shared polygon container. | |