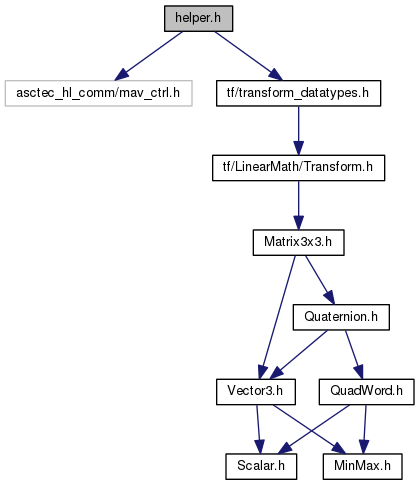
Include dependency graph for helper.h:
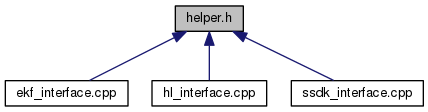
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | helper |
Functions | |
| void | helper::angle2quaternion (const double &roll, const double &pitch, const double &yaw, double *w, double *x, double *y, double *z) |
| converts AscTec's attitude angles to a quaternion | |
| template<typename T > | |
| double | helper::asctecAccToSI (const T &val) |
| converts AscTec acceleration values to m/s^2 | |
| template<typename T > | |
| double | helper::asctecAttitudeToSI (const T &val) |
| converts AscTec acceleration values to rad | |
| template<typename T > | |
| double | helper::asctecOmegaToSI (const T &val) |
| converts AscTec turn rates to rad/s | |
| template<typename T > | |
| T | helper::clamp (const T &min, const T &max, const T &val) |
| checks if val exceeds [min ... max] and returns a clamped value if necessary | |
| template<typename T > | |
| T | helper::clamp (const T &min, const T &max, const T &val, bool *clamped) |
| checks if val exceeds [min ... max] and returns a clamped value if necessary. | |
| double | helper::debug2Double (const int16_t ¶m) |
| converts a debug value fixpoint (fp) representation needed by the SSDK running datafusion and position control to double (d) | |
| double | helper::param2Double (const uint32_t ¶m) |
| converts a parameter from fixpoint (fp) representation needed by the SSDK running datafusion and position control to double (d) | |
| uint32_t | helper::param2Fixpoint (const double ¶m) |
| converts a parameter from double (d) to fixpoint (fp) representation needed by the SSDK running datafusion and position control | |
| uint16_t | helper::rateToPeriod (const double &rate) |
| converts a rate in Hz to an integer period in ms. | |
| template<typename T > | |
| void | helper::setDiagonalCovariance (T &covariance_matrix, const double &covariance) |
| int | helper::yaw2asctec (const double &yaw) |
| converts the yaw angle and range. AscTec uses 0...360° * 1000, we -pi...+pi | |
Variables | |
| const double | helper::ASCTEC_ACC_TO_SI = 9.81e-3 |
| conversion from AscTec acceleration values to m/s^2 | |
| const double | helper::ASCTEC_ATTITUDE_TO_SI = 0.01 * M_PI / 180.0 |
| conversion from AscTec attitude angles to rad | |
| const double | helper::ASCTEC_OMEGA_TO_SI = 0.015 * M_PI / 180.0 |
| conversion from AscTec turn rates to rad/s | |