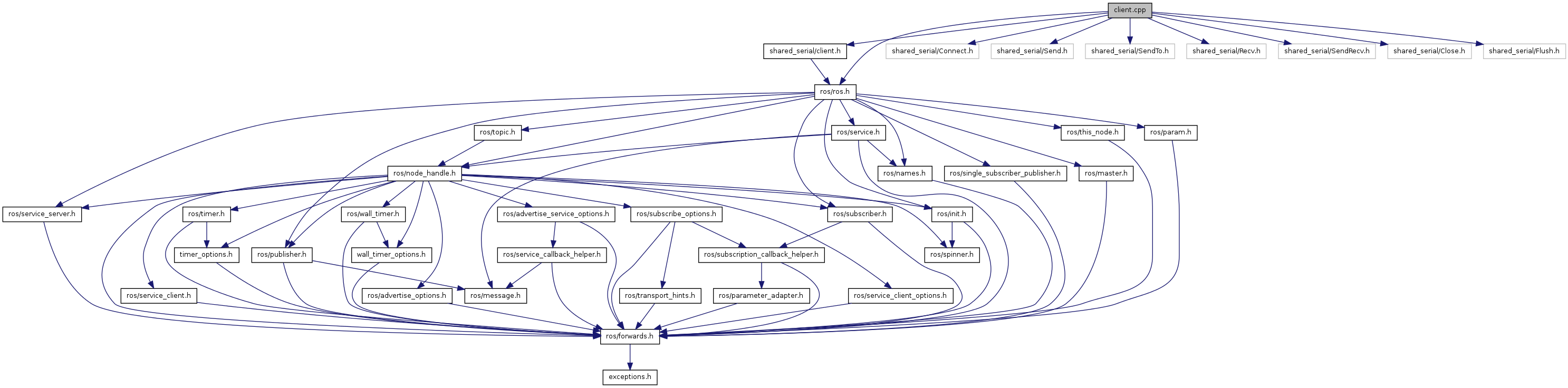
#include <ros/ros.h>#include <shared_serial/client.h>#include <shared_serial/Connect.h>#include <shared_serial/Send.h>#include <shared_serial/SendTo.h>#include <shared_serial/Recv.h>#include <shared_serial/SendRecv.h>#include <shared_serial/Close.h>#include <shared_serial/Flush.h>
Include dependency graph for client.cpp: