Design linear feedback controller¶
Let us now create a linear feedback controller that will stabilize the pendulum system that was created in the last section to its upright, unstable equilibrium.
Create pendulum system¶
Let us start by using the same code from the last section that creates a simple pendulum system with the addition of just a few lines.
# Import necessary python modules
import math
from math import pi
import numpy as np
from numpy import dot
import trep
import trep.discopt
from trep import tx, ty, tz, rx, ry, rz
import pylab
# Build a pendulum system
m = 1.0 # Mass of pendulum
l = 1.0 # Length of pendulum
q0 = 3./4.*pi # Initial configuration of pendulum
t0 = 0.0 # Initial time
tf = 5.0 # Final time
dt = 0.1 # Sampling time
qBar = pi # Desired configuration
Q = np.eye(2) # Cost weights for states
R = np.eye(1) # Cost weights for inputs
system = trep.System() # Initialize system
frames = [
rx('theta', name="pendulumShoulder"), [
tz(-l, name="pendulumArm", mass=m)]]
system.import_frames(frames) # Add frames
# Add forces to the system
trep.potentials.Gravity(system, (0, 0, -9.8)) # Add gravity
trep.forces.Damping(system, 1.0) # Add damping
trep.forces.ConfigForce(system, 'theta', 'theta-torque') # Add input
# Create and initialize the variational integrator
mvi = trep.MidpointVI(system)
mvi.initialize_from_configs(t0, np.array([q0]), t0+dt, np.array([q0]))
Three additional (highlighted above) modules are imported: dot from the numpy module, which we will use for matrix multiplication; pylab (part of the matplotlib project, which is used for plotting; and trep’s discrete optimization module, trep.discopt.
In addition, a desired configuration value has been set to the variable qBar. The desired configuration is \(\pi\), which is the pendulum’s neutrally-stable, upright configuration. Also, correctly-dimensioned, identity state and input weighting matrices (Q and R respectively) have been created for the optimization of the linear feedback controller.
Create discrete system¶
Trep has a module that provides functionality for solving several linear, time-varying discrete linear-quadratic regulation problems (see this page).
TVec = np.arange(t0, tf+dt, dt) # Initialize discrete time vector
dsys = trep.discopt.DSystem(mvi, TVec) # Initialize discrete system
xBar = dsys.build_state(qBar) # Create desired state configuration
To do this, we use our system definition, and a prescribed time vector to create a trep.discopt.DSystem. This object is basically a wrapper for trep.System objects and trep.MidpointVI objects to represent the general nonlinear discrete systems as first order discrete nonlinear systems of the form \(X(k+1) = f(X(k), U(k), k)\).
The states \(X\) and inputs \(U\) of a trep.discopt.DSystem should be noted. The state consists of the variational integrator’s full configuration, the dynamic momentum, and the kinematic velocity. The full configuration consist of both dynamic states and kinematic states. The difference being that the dynamic states are governed by first-order differential equations and the kinematic states can be set directly with “kinematic” inputs. This is equivalent to saying you have “perfect” control over a dynamic configuration i.e. your system is capable of exerting unlimited force to drive the configuration to follow any arbitrary trajectory. The kinematic velocity is calculated as a finite difference of the kinematic configurations. The trep.discopt.DSystem class has a method, trep.discopt.DSystem.build_state, that will “build” this state vector from configuration, momentum, and kinematic velocity vectors. “Build” here means construct a state array of the correct dimension. Anything that is not specified is set to zero. This is used above to calculated a desired state array from the desired configuration value.
Using IPython you can display a list of all the properties and methods of the discrete system.
>>> dsys.
dsys.build_input dsys.fdu dsys.save_state_trajectory
dsys.build_state dsys.fdudu dsys.set
dsys.build_trajectory dsys.fdx dsys.split_input
dsys.calc_feedback_controller dsys.fdxdu dsys.split_state
dsys.check_fdu dsys.fdxdx dsys.split_trajectory
dsys.check_fdudu dsys.k dsys.step
dsys.check_fdx dsys.kf dsys.system
dsys.check_fdxdu dsys.linearize_trajectory dsys.time
dsys.check_fdxdx dsys.load_state_trajectory dsys.uk
dsys.convert_trajectory dsys.nU dsys.varint
dsys.dproject dsys.nX dsys.xk
dsys.f dsys.project
Please refer to the DSystem documentation to learn more about this object.
Design linear feedback controller¶
Let us now design a linear feedback controller to stabilize the pendulum to the desired configuration.
Qd = np.zeros((len(TVec), dsys.system.nQ)) # Initialize desired configuration trajectory
thetaIndex = dsys.system.get_config('theta').index # Find index of theta config variable
for i,t in enumerate(TVec):
Qd[i, thetaIndex] = qBar # Set desired configuration trajectory
(Xd, Ud) = dsys.build_trajectory(Qd) # Set desired state and input trajectory
Qk = lambda k: Q # Create lambda function for state cost weights
Rk = lambda k: R # Create lambda function for input cost weights
KVec = dsys.calc_feedback_controller(Xd, Ud, Qk, Rk) # Solve for linear feedback controller gain
KStabilize = KVec[0] # Use only use first value to approximate infinite-horizon optimal controller gain
# Reset discrete system state
dsys.set(np.array([q0, 0.]), np.array([0.]), 0)
The DSystem class has a method (trep.discopt.DSystem.calc_feedback_controller) for calculating a stabilizing feedback controller for the system about state and input trajectories given both state and input weighting functions.
A trajectory of the desired configuration is constructed and then used with the trep.discopt.DSystem.build_trajectory method to create the desired state and input trajectories. The weighting functions are created with Python lambda functions that always output the state and input cost weights that were assigned to Qk and Rk. The calc_feedback_controller method returns the gain value \(K\) for each instance in time. To approximate the infinite-horizon optimal controller only the first value is used.
The discrete system must be reset to the initial state value because during the optimization the discrete system is integrated and thus set to the final time. Note, because the discrete system was created from the variational integrator, which was created from the system; setting the discrete system states also sets the configuration of variational integrator and the system. This can be checked by checking the values before and after running the set method, as shown below.
>>> dsys.xk
array([ 3.14159265, 0. ])
>>> mvi.q1
array([ 3.14159265])
>>> system.q
array([ 3.14159265])
>>> dsys.set(np.array([q0, 0.]), np.array([0.]), 0)
>>> dsys.xk
array([ 2.35619449, 0. ])
>>> mvi.q1
array([ 2.35619449])
>>> system.q
array([ 2.34019535])
>>> (mvi.q2 + mvi.q1)/2.0
array([ 2.34019535])
Note that the system.q returns the current configuration of the system. This is calculated using the midpoint rule and the endpoints of the variational integrator as seen above.
Simulate the system forward¶
As was done in the previous section of this tutorial the system is simulated forward with a while loop, which steps it forward one time step at a time.
T = [mvi.t1] # List to hold time values
Q = [mvi.q1] # List to hold configuration values
X = [dsys.xk] # List to hold state values
U = [] # List to hold input values
while mvi.t1 < tf-dt:
x = dsys.xk # Grab current state
xTilde = x - xBar # Compare to desired state
u = -dot(KStabilize, xTilde) # Calculate input
dsys.step(u) # Step the system forward by one time step
T.append(mvi.t1) # Update lists
Q.append(mvi.q1)
X.append(x)
U.append(u)
This time the system is stepped forward with the trep.discopt.DSystem.step method instead of the trep.MidpointVI.step method. This is done so that the discrete state gets updated and set as well as the system configurations and momenta. The input is calcuated with a standard negative feedback of the state error multiplied by the gain that was found previously. In addition, two more variables are created to store the state values and the input values throughout the simulation.
Visualize the system in action¶
The visualization is created in the exact way it was created in the last section. But this time also plotting state and input verse time.
trep.visual.visualize_3d([ trep.visual.VisualItem3D(system, T, Q) ])
# Plot results
ax1 = pylab.subplot(211)
pylab.plot(T, X)
pylab.title("Linear Feedback Controller")
pylab.ylabel("X")
pylab.legend(["qd","p"])
pylab.subplot(212, sharex=ax1)
pylab.plot(T[1:], U)
pylab.xlabel("T")
pylab.ylabel("U")
pylab.legend(["u"])
pylab.show()
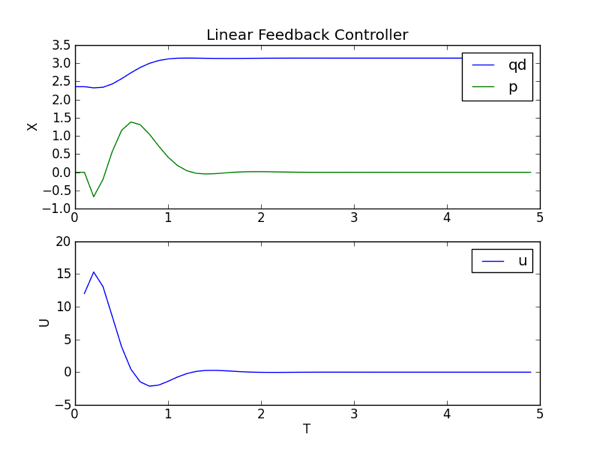
From the plot you can see that it requires a large input to stablize the pendulum. What if the input torque is limited to a smaller value and we want to bring the pendulum to the upright configuration from any other configuration? By using a swing-up controller and then switching to this linear feedback controller we can accomplish this stabilization with a limited input from any configuration. We will demonstrate how this can be done with trep in the next two sections.
linearFeedbackController.py code¶
Below is the entire script used in this section of the tutorial.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 | # linearFeedbackController.py
# Import necessary python modules
import math
from math import pi
import numpy as np
from numpy import dot
import trep
import trep.discopt
from trep import tx, ty, tz, rx, ry, rz
import pylab
# Build a pendulum system
m = 1.0 # Mass of pendulum
l = 1.0 # Length of pendulum
q0 = 3./4.*pi # Initial configuration of pendulum
t0 = 0.0 # Initial time
tf = 5.0 # Final time
dt = 0.1 # Sampling time
qBar = pi # Desired configuration
Q = np.eye(2) # Cost weights for states
R = np.eye(1) # Cost weights for inputs
system = trep.System() # Initialize system
frames = [
rx('theta', name="pendulumShoulder"), [
tz(-l, name="pendulumArm", mass=m)]]
system.import_frames(frames) # Add frames
# Add forces to the system
trep.potentials.Gravity(system, (0, 0, -9.8)) # Add gravity
trep.forces.Damping(system, 1.0) # Add damping
trep.forces.ConfigForce(system, 'theta', 'theta-torque') # Add input
# Create and initialize the variational integrator
mvi = trep.MidpointVI(system)
mvi.initialize_from_configs(t0, np.array([q0]), t0+dt, np.array([q0]))
# Create discrete system
TVec = np.arange(t0, tf+dt, dt) # Initialize discrete time vector
dsys = trep.discopt.DSystem(mvi, TVec) # Initialize discrete system
xBar = dsys.build_state(qBar) # Create desired state configuration
# Design linear feedback controller
Qd = np.zeros((len(TVec), dsys.system.nQ)) # Initialize desired configuration trajectory
thetaIndex = dsys.system.get_config('theta').index # Find index of theta config variable
for i,t in enumerate(TVec):
Qd[i, thetaIndex] = qBar # Set desired configuration trajectory
(Xd, Ud) = dsys.build_trajectory(Qd) # Set desired state and input trajectory
Qk = lambda k: Q # Create lambda function for state cost weights
Rk = lambda k: R # Create lambda function for input cost weights
KVec = dsys.calc_feedback_controller(Xd, Ud, Qk, Rk) # Solve for linear feedback controller gain
KStabilize = KVec[0] # Use only use first value to approximate infinite-horizon optimal controller gain
# Reset discrete system state
dsys.set(np.array([q0, 0.]), np.array([0.]), 0)
# Simulate the system forward
T = [mvi.t1] # List to hold time values
Q = [mvi.q1] # List to hold configuration values
X = [dsys.xk] # List to hold state values
U = [] # List to hold input values
while mvi.t1 < tf-dt:
x = dsys.xk # Grab current state
xTilde = x - xBar # Compare to desired state
u = -dot(KStabilize, xTilde) # Calculate input
dsys.step(u) # Step the system forward by one time step
T.append(mvi.t1) # Update lists
Q.append(mvi.q1)
X.append(x)
U.append(u)
# Visualize the system in action
trep.visual.visualize_3d([ trep.visual.VisualItem3D(system, T, Q) ])
# Plot results
ax1 = pylab.subplot(211)
pylab.plot(T, X)
pylab.title("Linear Feedback Controller")
pylab.ylabel("X")
pylab.legend(["qd","p"])
pylab.subplot(212, sharex=ax1)
pylab.plot(T[1:], U)
pylab.xlabel("T")
pylab.ylabel("U")
pylab.legend(["u"])
pylab.show()
|