Include dependency graph for play_motion_helpers.h:
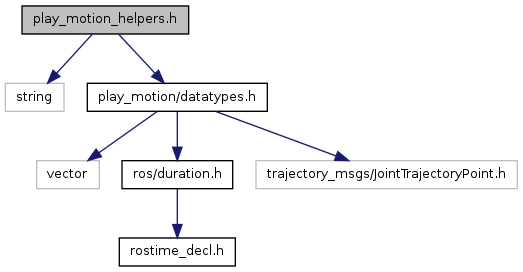
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | play_motion::MotionInfo |
Namespaces | |
| namespace | play_motion |
| namespace | ros |
Functions | |
| void | play_motion::getMotion (const ros::NodeHandle &nh, const std::string &motion_id, MotionInfo &motion_info) |
| Parse a motion specified in the ROS parameter server into a data structure. | |
| void | play_motion::getMotion (const std::string &motion_id, MotionInfo &motion_info) |
| ros::Duration | play_motion::getMotionDuration (const ros::NodeHandle &nh, const std::string &motion_id) |
| getMotionDuration gets the total duration of a motion | |
| void | play_motion::getMotionIds (const ros::NodeHandle &nh, MotionNames &motion_ids) |
| getMotions obtain all motion names | |
| void | play_motion::getMotionIds (MotionNames &motion_ids) |
| void | play_motion::getMotionJoints (const ros::NodeHandle &nh, const std::string &motion_id, JointNames &motion_joints) |
| void | play_motion::getMotionJoints (const std::string &motion_id, JointNames &motion_joints) |
| void | play_motion::getMotionPoints (const ros::NodeHandle &nh, const std::string &motion_id, Trajectory &motion_points) |
| void | play_motion::getMotionPoints (const std::string &motion_id, Trajectory &motion_points) |
| bool | play_motion::isAlreadyThere (const JointNames &target_joints, const TrajPoint &target_point, const JointNames &source_joints, const TrajPoint &source_point, double tolerance=0.15) |
| isAlreadyThere checks if the source trajPoint matches the target trajPoint with a certain tolerance only the joints in targetJoint will be checked | |
| bool | play_motion::motionExists (const ros::NodeHandle &nh, const std::string &motion_id) |
| bool | play_motion::motionExists (const std::string &motion_id) |
| void | play_motion::populateVelocities (const TrajPoint &point_prev, const TrajPoint &point_next, TrajPoint &point_curr) |
| Populate joint velocity information of a trajectory waypoint. | |
| void | play_motion::populateVelocities (const Trajectory &traj_in, Trajectory &traj_out) |
| Populate joint velocity information of a trajectory. | |