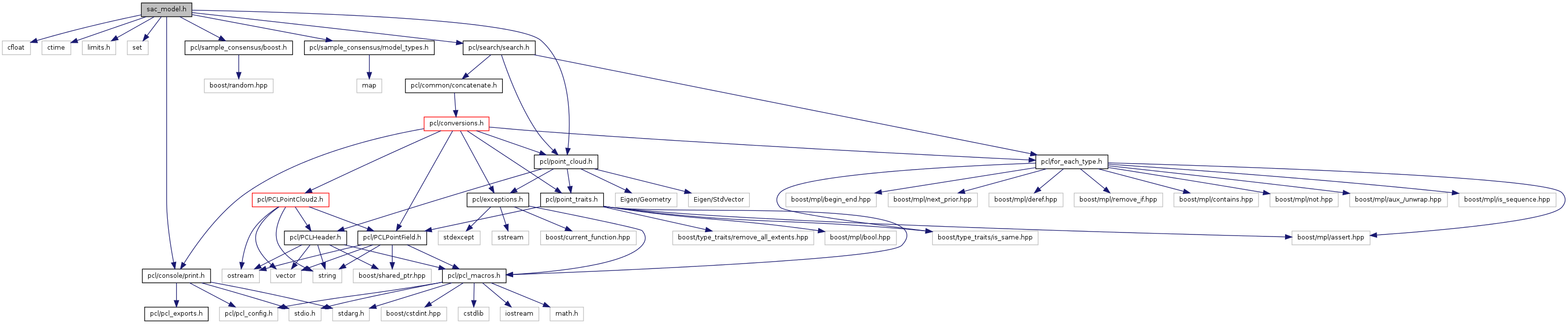
#include <cfloat>#include <ctime>#include <limits.h>#include <set>#include <pcl/console/print.h>#include <pcl/point_cloud.h>#include <pcl/sample_consensus/boost.h>#include <pcl/sample_consensus/model_types.h>#include <pcl/search/search.h>
Include dependency graph for sac_model.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pcl::Functor< _Scalar, NX, NY > |
| class | pcl::SampleConsensusModel< PointT > |
| SampleConsensusModel represents the base model class. All sample consensus models must inherit from this class. More... | |
| class | pcl::SampleConsensusModelFromNormals< PointT, PointNT > |
| SampleConsensusModelFromNormals represents the base model class for models that require the use of surface normals for estimation. More... | |
Namespaces | |
| namespace | pcl |