#include "auxiliary.h"#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl/pcl_exports.h>#include <cstdlib>#include <ctime>#include <vector>#include <list>#include <set>
Include dependency graph for orr_octree.h:

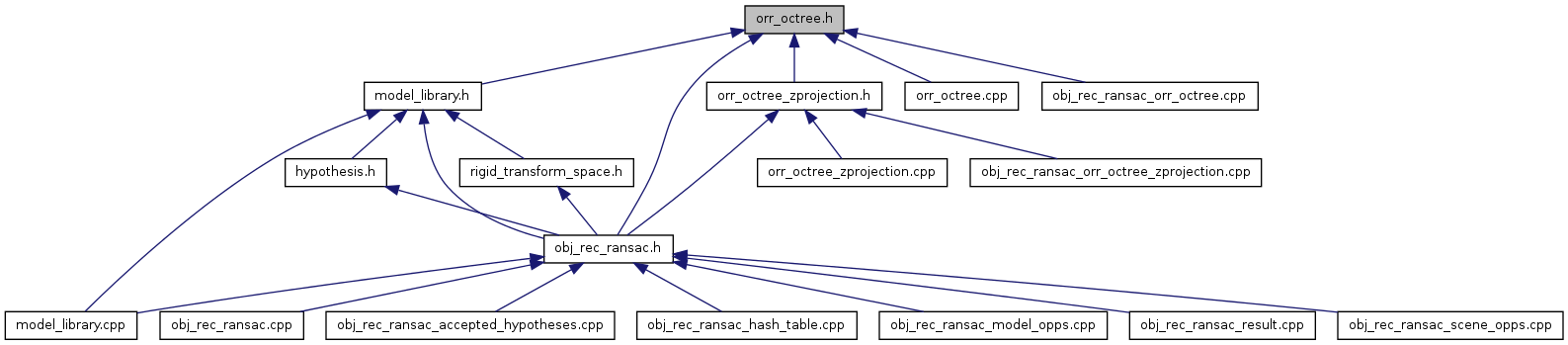
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::recognition::ORROctree::Node::Data |
| class | pcl::recognition::ORROctree::Node |
| class | pcl::recognition::ORROctree |
| That's a very specialized and simple octree class. That's the way it is intended to be, that's why no templates and stuff like this. More... | |
Namespaces | |
| namespace | pcl |
| namespace | pcl::recognition |