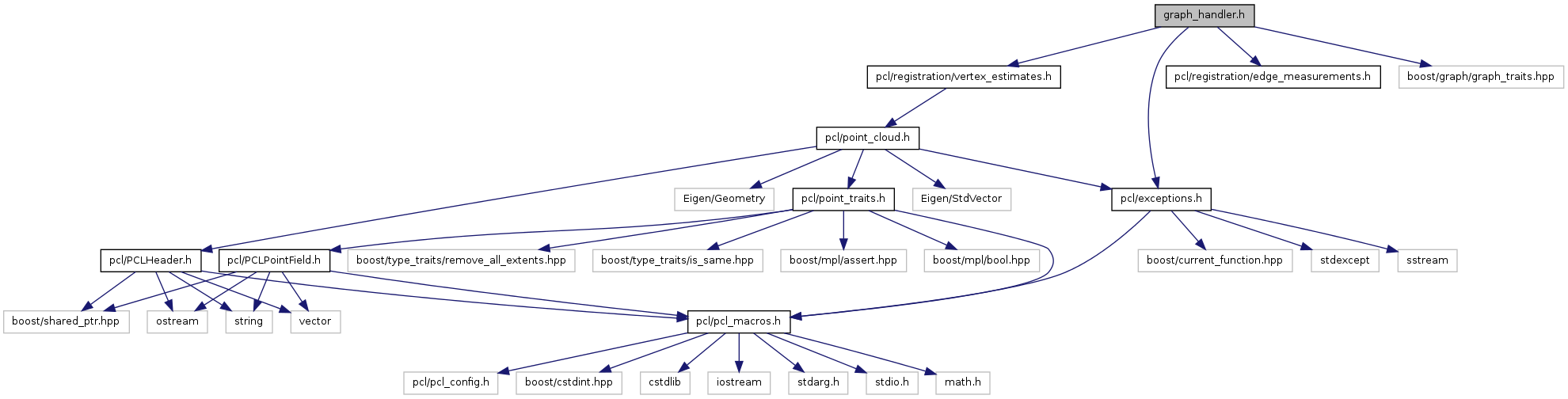
#include <pcl/registration/vertex_estimates.h>#include <pcl/registration/edge_measurements.h>#include <pcl/exceptions.h>#include "boost/graph/graph_traits.hpp"
Include dependency graph for graph_handler.h:
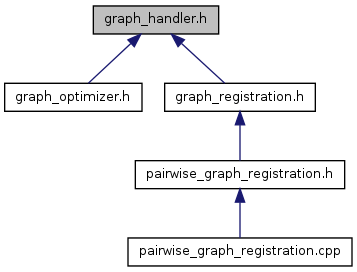
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::registration::GraphHandler< GraphT > |
| GraphHandler class is a wrapper for a general SLAM graph The actual graph class must fulfil the following boost::graph concepts: More... | |
Namespaces | |
| namespace | pcl |
| namespace | pcl::registration |