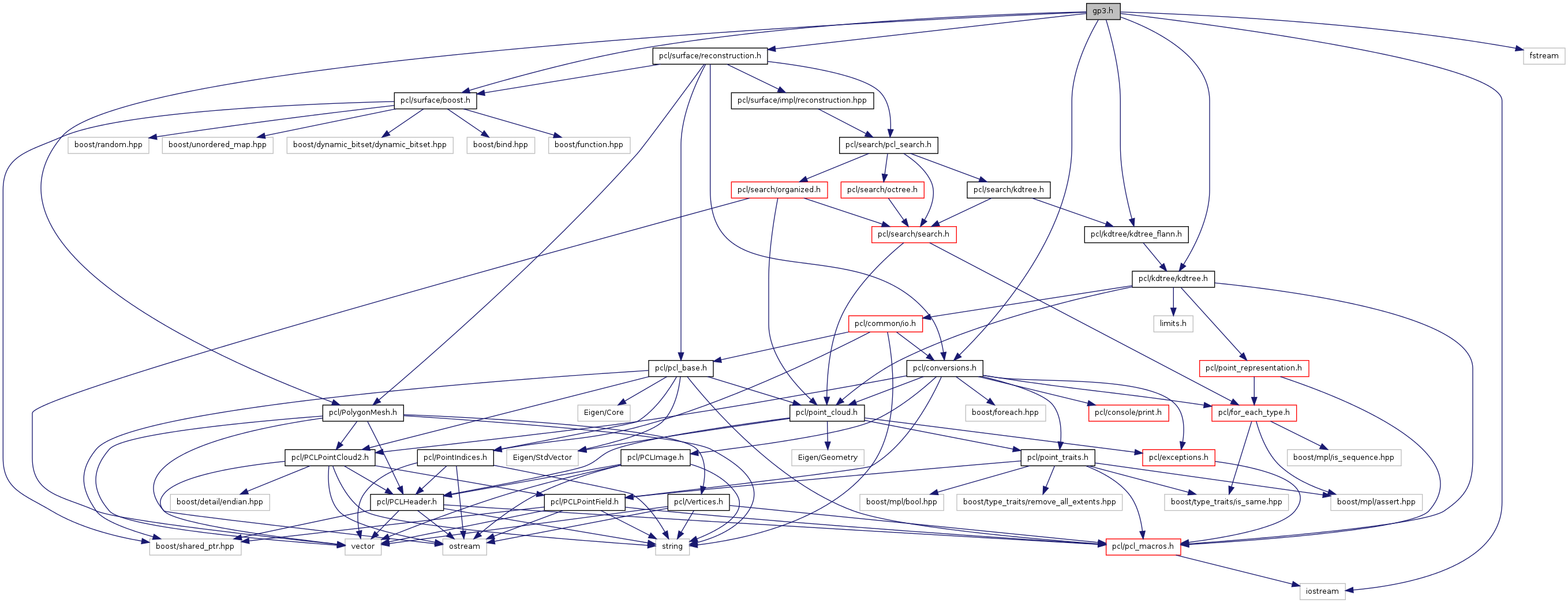
#include <pcl/surface/reconstruction.h>#include <pcl/surface/boost.h>#include <pcl/conversions.h>#include <pcl/kdtree/kdtree.h>#include <pcl/kdtree/kdtree_flann.h>#include <pcl/PolygonMesh.h>#include <fstream>#include <iostream>
Include dependency graph for gp3.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pcl::GreedyProjectionTriangulation< PointInT >::doubleEdge |
| Struct for storing the edges starting from a fringe point. More... | |
| class | pcl::GreedyProjectionTriangulation< PointInT > |
| GreedyProjectionTriangulation is an implementation of a greedy triangulation algorithm for 3D points based on local 2D projections. It assumes locally smooth surfaces and relatively smooth transitions between areas with different point densities. More... | |
| struct | pcl::GreedyProjectionTriangulation< PointInT >::nnAngle |
| Struct for storing the angles to nearest neighbors. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| bool | pcl::isVisible (const Eigen::Vector2f &X, const Eigen::Vector2f &S1, const Eigen::Vector2f &S2, const Eigen::Vector2f &R=Eigen::Vector2f::Zero()) |
| Returns if a point X is visible from point R (or the origin) when taking into account the segment between the points S1 and S2. | |