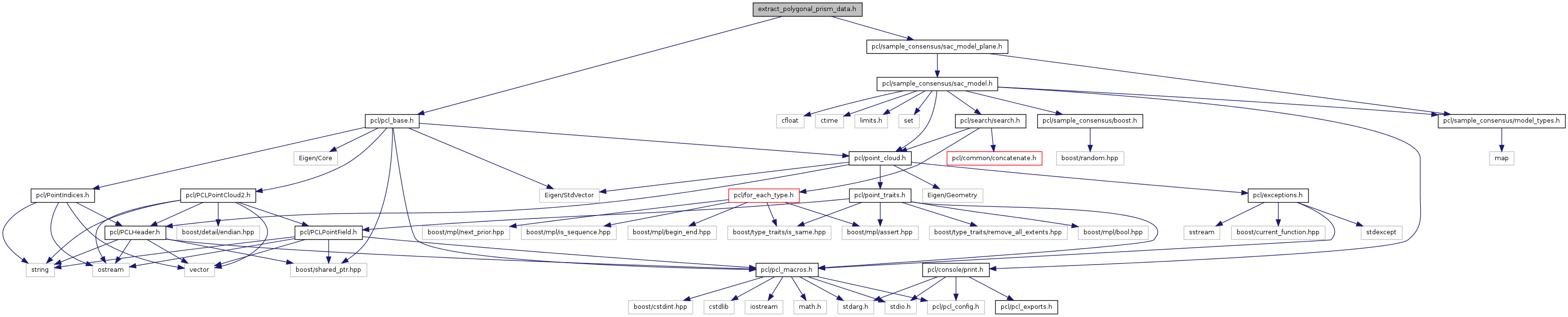
Include dependency graph for extract_polygonal_prism_data.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::ExtractPolygonalPrismData< PointT > |
| ExtractPolygonalPrismData uses a set of point indices that represent a planar model, and together with a given height, generates a 3D polygonal prism. The polygonal prism is then used to segment all points lying inside it. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename PointT > | |
| bool | pcl::isPointIn2DPolygon (const PointT &point, const pcl::PointCloud< PointT > &polygon) |
| General purpose method for checking if a 3D point is inside or outside a given 2D polygon. | |
| template<typename PointT > | |
| bool | pcl::isXYPointIn2DXYPolygon (const PointT &point, const pcl::PointCloud< PointT > &polygon) |
| Check if a 2d point (X and Y coordinates considered only!) is inside or outside a given polygon. This method assumes that both the point and the polygon are projected onto the XY plane. | |