#include <pcl/registration/correspondence_estimation.h>#include <pcl/registration/impl/correspondence_estimation_organized_projection.hpp>
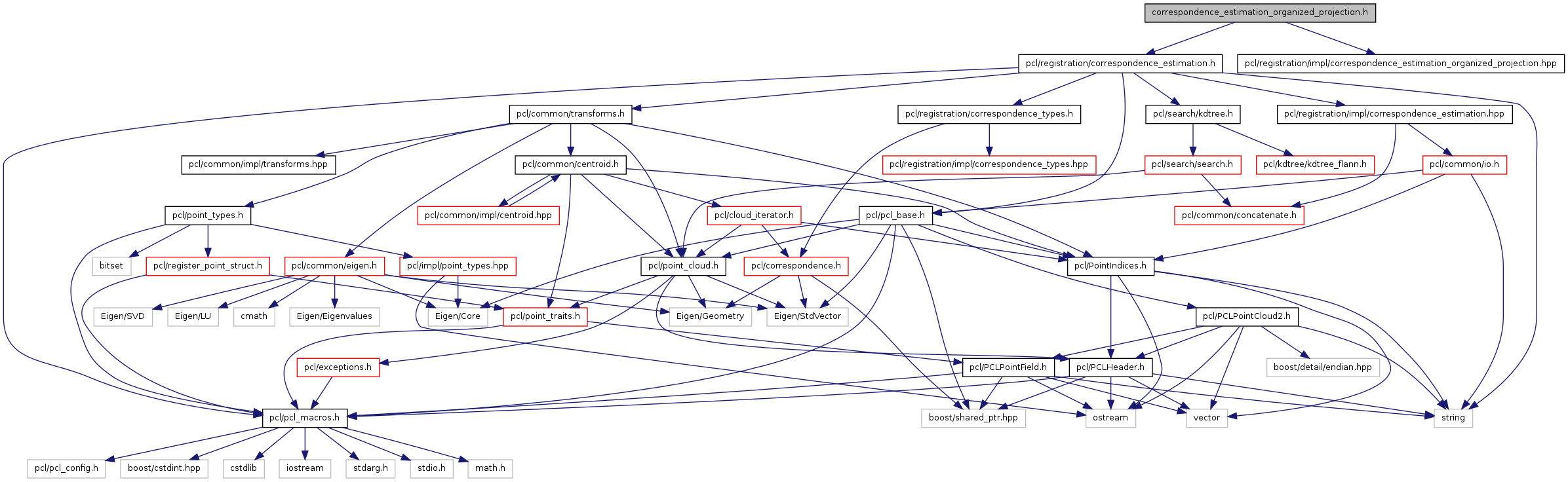
Include dependency graph for correspondence_estimation_organized_projection.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::registration::CorrespondenceEstimationOrganizedProjection< PointSource, PointTarget, Scalar > |
| CorrespondenceEstimationOrganizedProjection computes correspondences by projecting the source point cloud onto the target point cloud using the camera intrinsic and extrinsic parameters. The correspondences can be trimmed by a depth threshold and by a distance threshold. It is not as precise as a nearest neighbor search, but it is much faster, as it avoids the usage of any additional structures (i.e., kd-trees). More... | |
Namespaces | |
| namespace | pcl |
| namespace | pcl::registration |